\(\def\bm{\boldsymbol}\)\(\def\di{\displaystyle}\)\(\def\ve{\varepsilon}\)\(\def\vd{\varDelta}\)\(\newcommand{\pdr}[2]{\dfrac{\partial #1}{\partial #2}}\)\(\newcommand{\ppdr}[2]{\dfrac{\partial^2 #1}{\partial #2}}\)
1.クーロンの法則
電荷\(\,q\,\)と\(\,Q\,\)を持つ2個の点電荷の間の距離を\(\,R\,\),それらの間に作用する力の大きさを\(\,F\,\)と書くと
\(F=\dfrac{1}{4\pi\varepsilon_0}\dfrac{q\cdot Q}{R^2}\qquad\cdots\,\)(1)
点電荷\(\,q\,\)の位置ベクトルを\(\,\bm{z}_0\,\)、\(Q\,\)を\(\,\bm{z}\,\)とすると
\(R=|\bm{z}_0-\bm{z}|\,\)なので、電荷\(\,Q\,\)が点電荷\(\,q\,\)に作用する力は
\(F(\bm{z}_0)=\dfrac{q}{4\pi\varepsilon_0}\dfrac{Q(\bm{z}_0-\bm{z})}{|\bm{z}_0-\bm{z}|^3}\qquad\cdots\,\)(2)
次に、\(n\,\)個の点電荷\(\,Q_1,Q_2,\cdots,Q_n\,\)がそれぞれ\(\,\bm{z}_1,\bm{z}_2,\cdots,\bm{z}_n\,\)
の位置にあるとき、これらが点電荷\(\,q\,\)に作用する力は、
それぞれの点電荷が作用する力のベクトルの和で与えられる。
\(\bm{F}(\bm{z}_0)=\dfrac{q}{4\pi\ve_0}\cdot\di\sum_{i=1}^n\dfrac{Q_i(\bm{z}_0-\bm{z}_i)}{|\bm{z}_0-\bm{z}_i|^3}\qquad\cdots\,\)(3)
これがオリジナルのクーロンの法則であるが、\(q\,\)がゼロの場合、力が働かない事になる。
マックスウェルは近接作用である場の概念を導入し、電場というものを考えた。
これは、電荷がその周りに電場を作り、その電場に電荷が置かれると力が働くと言うことである
つまり、電場\(\,\bm{E}\,\)(ベクトル量を導入すると (2)式は以下のように分割される。
\(\bm{F}(\bm{z}_0)=q\bm{E}(\bm{x}=\bm{z}_0)\quad\cdots\,\)(4)\(\qquad\bm{E}(\bm{x})=\dfrac{Q}{4\pi\ve_0}\dfrac{\bm{x}-\bm{z}}{|\bm{x}-\bm{z}|^3}\quad\cdots\,\)(5)
2.ガウスの法則
(1) 積分形
 点電荷\(\,Q\,\)が閉曲面\(\,S\,\)に囲まれている。
点電荷\(\,Q\,\)が閉曲面\(\,S\,\)に囲まれている。
閉曲面\(\,S\,\)上にとった微小曲面\(\,dS\,\)とその上の電磁場\(\,\bm{E}(\bm{x})\,\)を考える。
\(\,dS\,\)に立てた単位法線ベクトルを\(\,\bm{n}(\bm{x})\,\)とすると、
\(\bm{E}(\bm{x})\,\)の\(\,\bm{n}(\bm{x})\,\)方向の成分は
\(\bm{E}(\bm{x})\cdot\bm{n}(\bm{x})=\dfrac{Q}{4\pi\ve_0R^2}\cos\theta\qquad\cdots\,\)(6)
ここで\(\,R\,\)は点電荷\(\,Q\,\)から微小面\(\,dS\,\)までの距離であり、\(\theta\,\)は\(\,\bm{E}(\bm{x})\,\)と\(\,\bm{n}(\bm{x})\,\)
とのなす角である。微小面\(\,dS\,\)を点電荷\(\,Q\,\)からみた立体角\(\,d\Omega\,\)は
\(\dfrac{dS\cos\theta}{d\Omega}=\dfrac{R^2}{1^2}\quad\)より\(\quad d\Omega=\dfrac{\cos\theta\,dS}{R^2}\qquad\cdots\,\)(7)
で与えられる。これを 式(6)に代入すると\(\quad\bm{E}(\bm{x})\cdot\bm{n}(\bm{x})\,dS=\dfrac{Q}{4\pi\ve_0R^2}\cos\theta\,dS=\dfrac{Q}{4\pi\ve_0}d\Omega\)
これを閉曲面\(\,S\,\)上にわたって面積分すると
\(\di\int_S\bm{E}(\bm{x})\cdot\bm{n}(\bm{x})\,dS=\dfrac{Q}{4\pi\ve_0}\di\int d\Omega=\dfrac{Q}{4\pi\ve_0}\cdot 4\pi=\dfrac{Q}{\ve_0}\qquad\cdots\,\)(8)
点電荷が閉曲面の外側にある場合、\(Q\,\)からみた同一立体角内に二つの相対する微小曲面\(\,dS\,,\,dS’\,\)があることになる。
閉曲面の分割は任意であるから\(\,dS\ne dS’\,\)でよいが、\(Q\,\)からみた立体角\(\,d\Omega\,\)が同じなので、相殺される。
\(S\,\)内に、点電荷\(\,Q_1,Q_2,\cdots,Q_n\,\)がある場合、全体の電場\(\,\bm{E}(\bm{x})\,\)の面積分は、
含まれる点電荷の和を\(\,\varepsilon_0\,\)で割ったものになる。
\(\di\int_S\bm{E}(\bm{x})\cdot\bm{n}(\bm{x})\,dS=\dfrac{1}{\ve_0}(Q_1+Q_2+\cdots+Q_n)\qquad\cdots\,\)(9)
これを積分型のガウスの法則という。
(2) 微分形
 体積が\(\,\varDelta^3x\equiv\varDelta x\varDelta y\varDelta x\,\)である立方体の箱を考え
体積が\(\,\varDelta^3x\equiv\varDelta x\varDelta y\varDelta x\,\)である立方体の箱を考え
この箱の中に正電荷があるとする。この電荷が作る電場は箱の
中から外向きに出ている。そこで、箱の表面\(\,S\,\)上の面積分を考える。
まず、\(x\,\)軸に直交する二つの面 A と B を考える。A 面上では
\(\di\int_A\bm{E}\cdot\bm{n}\,dS=E_x(x+\varDelta x,y,z)\varDelta y\varDelta z\)
ここで変数\(\,y\,,\,z\,\)では2次以上の微少量を無視している。B 面上では
\(\di\int_A\bm{E}\cdot\bm{n}\,dS=-E_x(x,y,z)\varDelta y\varDelta z\)
ここで負号がつくのは、B面上に立てた単位法線ベクトル\(\,\bm{n}\,\)の方向が\(\,x\,\)軸の負の
方向を向いているからである。これらを加え合わせると
\(\di\int_{A+B}\bm{E}\cdot\bm{n}\,dS=\dfrac{E_x(x+\varDelta x,y,z)-E_x(x,y,z)}{\varDelta x}\cdot\varDelta x\varDelta y\varDelta z=\pdr{E_x(\bm(x)}{x}\varDelta^3 x\)
となる。\(y\,\)軸と\(\,z\,\)軸に垂直な面についても同様の計算をし、これらを加えると
\(\di\int_S\bm{E}\cdot\bm{n}\,dS=\left(\pdr{E_x(\bm{x})}{x}+\pdr{E_y(\bm{x})}{y}+\pdr{E_z(\bm{x})}{z}\right)\varDelta^3x\qquad\cdots\,\)(10)
ここで\(\,\mathrm{div}\,\bm{E}(\bm{x})\,\)という量を定義する。
\(\mathrm{div}\,\bm{E}(\bm{x})=\di\lim_{\varDelta^3x\to 0}\dfrac{1}{\varDelta^3 x}\di\int_S\bm{E}\cdot\bm{n}\,dS\qquad\cdots\,\)(11) より
\(\mathrm{div}\,\bm{E}(\bm{x})=\pdr{E_x(\bm{x})}{x}+\pdr{E_y(\bm{x})}{y}+\pdr{E_z(\bm{x})}{z}\qquad\cdots\,\)(12)
これをベクトル\(\,\bm{E}(\bm{x})\,\)の 発散 (divergence) という。
ここで、閉曲面\(\,S\,\)によって囲まれる空間の体積を\(\,V\,\)とすると、ガウスの定理より
\(\di\int_S\bm{E}(\bm{x})\cdot\bm{n}\,dS=\di\int_V\mathrm{div}\,\bm{E}(\bm{x})\,d^3x\qquad\cdots\,\)(13)
ここで、式(9)の左辺は式(13)のように変形されるから、式(9)は
\(\di\int_V\mathrm{div}\,\bm{E}(\bm{x})\,d^3x=\dfrac{1}{\ve_0}\di\int_V\rho(\bm{x})d^3x\quad\)となる。
ここで積分領域\(\,V\,\)を任意の点\(\,\bm{x}\,\)の周りの微小領域\(\,\varDelta^3x\,\)にとれば
\(\mathrm{div}\,\bm{E}(\bm{x})\varDelta^3x=\rho(\bm{x})\varDelta^3x/\ve_0\,\)となり、任意の場所で
\(\mathrm{div}\,\bm{E}(\bm{x})=\dfrac{1}{\ve_0}\rho(\bm{x})\qquad\cdots\,\)(14)
これを微分形のガウスの法則という。
3.静電ポテンシャル
(1) ストークスの定理
任意のベクトル場を考えたとき、以下の式が成立するのがストークスの定理
\(\di\int_C\bm{X}(\bm{x})\cdot d\bm{x}=\di\int_S\mathrm{rot}\,\bm{X}(\bm{x})\cdot\bm{n}(\bm{x})\,dS\qquad\cdots\,\)(15)
 左辺の線積分は図のような任意の閉曲線\(\,C\,\)について、
左辺の線積分は図のような任意の閉曲線\(\,C\,\)について、
図のような方向への1周にわたる積分であり、右辺の積分は
閉曲線\(\,C\,\)によって囲まれた任意の曲面\(\,S\,\)上での面積分である。
また、\(\mathrm{rot}\,\bm{X}(\bm{x})\,\)とは、その成分が
\(\mathrm{rot}\,\bm{X}(\bm{x})\equiv\left(\pdr{X_z}{y}-\pdr{X_y}{z},\,\pdr{X_x}{z}-\pdr{X_z}{x},\,\pdr{X_y}{x}-\pdr{X_x}{y}\right)\quad\cdots\,\)(16)
ここで、まず2次元で閉曲面\(\,C’\,\)を考える。\(\bm{X}(\bm{x})\,\)を\(\,\bm{Y}(x,y)\,\)と書き換える。
すると線積分は、2次以上の微少量を無視すると
\(\di\int_{C’}\bm{Y}(x,y)\cdot d\bm{x}=Y_x(x,y)\varDelta x+Y_y(x+\vd,y)\vd y+Y_y(x,y)(-\vd y)+Y_x(x,y+\vd y)(-\vd x)\)
\(\hspace{30mm}=\left(\pdr{Y_y(x,y)}{x}-\pdr{Y_x(x,y)}{y}\right)\vd x\vd y\)
\(\hspace{30mm}=(\mathrm{rot}\,\bm{Y}(x,y))_z\vd x\vd y\qquad\cdots\,\)(17)
式(17)より
\(\left(\pdr{Y_y(x,y)}{x}-\pdr{Y_x(x,y)}{y}\right)=\dfrac{1}{\vd x\vd y}\di\int_{C’}\bm{Y}(x,y)\cdot d\bm{x}\)
このような線積分を各微小長方形に分割して行う。隣り合わせの線積分の方向が反対向きなので
打ち消し合うことになる。最終的に隣り合う相手のいない周辺上の線積分だけが残るので、
\(\di\int_{C’}\bm{Y}(x,y)\cdot d\bm{x}=\di\sum_i(\mathrm{tot}\,\bm{Y}(x_i,y_i))_z\vd x_i\vd y_i\)
\(\hspace{32mm}=\di\int_{S’}(\mathrm{rot}\,\bm{Y}(x,y))_zdS’\qquad\cdots\,\)(18)
これが2次元のストークスの定理である。
この定理から\(\,\mathrm{rot}\,\bm{X}_x(\bm{x})=0\,\)のとき、以下の式がなりたつ。
\(quad\di\int_C\bm{X}(\bm{x})\cdot d\bm{x}=0\qquad\cdots\,\)(19)
 閉曲線\(\,C\,\)の周りの1周の線積分を図のように
閉曲線\(\,C\,\)の周りの1周の線積分を図のように
P点から出発してQ点にいたる2つの曲線\(\,C_1\,\)と\(\,C_2\,\)上の線積分に分解すると
\(\di\int_{\mathrm{P},C_1}^{\mathrm{Q}}\bm{X}(\bm{x})\cdot d\bm{x}+\di\int_{\mathrm{Q},C_2}^{\mathrm{P}}\bm{X}(\bm{x})\cdot d\bm{x}\)
\(\hspace{10mm}=\di\int_{\mathrm{P},C_1}^{\mathrm{Q}}\bm{X}(\bm{x})\cdot d\bm{x}-\di\int_{\mathrm{P},C_2}^{\mathrm{Q}}\bm{X}(\bm{x})\cdot d\bm{x}=0\)
従って、点Pから点Qまでの線積分
\(\quad\di\int_{\mathrm{P}}^{\mathrm{Q}}\bm{X}(\bm{x})\cdot d\bm{x}\qquad\cdots\,\)(20)\(\qquad\)は途中の道筋によらず一定の値を取る。
すなわち、2点間の線積分が途中の道筋によらず一定の値を取るための必要かつ十分な条件は
\(\quad\mathrm{rot}\,\bm{X}(\bm{x})=0\quad\cdots\,\)(21)\(\quad\)が成立することである。
(2) 静電ポテンシャル
静電場が式(21)を満たすか、検証する。
まず、単位体積中の電荷量、つまり電荷密度を\(\,\rho(\bm{x}_i)\,\)とすると、電場\(\,\bm{E}(\bm{x})\,\)は
\(\bm{E}(\bm{x})=\dfrac{1}{4\pi\ve}\di\int_{-\infty}^{\infty}d^3x’\dfrac{(\bm{x}-\bm{x}’)\rho(\bm{x}’)}{|\bm{x}-\bm{x}’|^3}\qquad\cdots\,\)(22)
ここで、まず次の微分の計算をする。
\(\pdr{}{x}\dfrac{1}{|\bm{x}-\bm{x}’|^n}=-n\dfrac{x-x’}{|\bm{x}-\bm{x}’|^{n+2}}\qquad\cdots\,\)(23)
次に\(\,\mathrm{rot}\,\bm{E}(\bm{x})\,\)の\(\,x\,\)成分を計算する。式(22) から、
\(\pdr{E_x(\bm{x})}{y}-\pdr{E_y(\bm{x})}{x}\)
\(\hspace{10mm}=\dfrac{1}{4\pi\ve_0}\di\int_{-\infty}^{\infty}d^3x’\rho(\bm{x}’)\left[(z-z’)\pdr{}{y}\dfrac{1}{|\bm{x}-\bm{x}’|^3}-(y-y’)\pdr{}{x}\dfrac{1}{|\bm{x}-\bm{x}’|^3}\right]\)
\(\hspace{10mm}=-\dfrac{3}{4\pi\ve_0}\di\int_{-\infty}^{\infty}d^3x’\rho(\bm{x}’)\left[\dfrac{(z-z’)(y-y’)}{|\bm{x}-\bm{x}’|^3}-\dfrac{(y-y’)(z-z’)}{|\bm{x}-\bm{x}’|^3}\right]=0\qquad\cdots\,\)(24)
\(y\,\)成分、\(z\,\)成分についても同様である。よって静電場において\(\quad\mathrm{rot}\,\bm{E}(\bm{x})=0\qquad\cdots\,\)(25)\(\quad\)が成り立つ。
式(14)と式(25)を満たしている静電場\(\quad\bm{E}(\bm{x})\,\)は、ポテンシャル関数\(\,\phi(\bm{x})\,\)の勾配(gradient)で表す事が出来る。
\(\bm{E}(\bm{x})=-\mathrm{grad}\,\phi(\bm{x})\qquad\cdots\,\)(26)
この関数\(\,\phi(\bm{x})\,\)を 静電ポテンシャル という。
式(22)と(23)から、以下の式が得られる。
\(\bm{E}(\bm{x})=-\dfrac{1}{4\pi\ve_0}\,\mathrm{grad}_x\di\int_{-\infty}^{\infty}d^3x’\dfrac{\rho(\bm{x}’)}{|\bm{x}-\bm{x}’|}\qquad\cdots\,\)(27)
ここで、\(\mathrm{grad}_x\,\)は変数\(\,x,y,z\,\)による微分を取ることを意味する。
式(26)と式(27)から
\(\phi(\bm{x})=\dfrac{1}{4\pi\ve_0}\di\int_{-\infty}^{\infty}d^3x’\dfrac{\rho(\bm{x}’)}{|\bm{x}-\bm{x}’|}\qquad\cdots\,\)(28)
が成り立つ。
\(\star\,\)ガウスの法則より、電場の発散は式(14)から\(\quad\nabla\cdot\bm{E}(\bm{x})=\rho(\bm{x})/\ve_0\qquad\cdots\,\)(29)\(\quad\)となる。
4.電荷のテスト
参考資料
import numpy as np
import matplotlib.pyplot as plt
import japanize_matplotlib # 日本語表示用
#グラフ範囲を指定
LX, LY = 2.2, 2.2
# ベクトル場のベクトルの間隔の変数を gw とする
gw = 0.05
nn=int(2*LX/gw) # 本数
coords,ds = np.linspace(-LX,LX,nn,retstep=True) # 座標と刻み幅の等差数列
# k = 4Πε0
k = 1.
x, y= np.meshgrid(coords, coords) # x,y メッシュグリッド作成
# 点電荷の座標 (x1,y1), 電荷 q1
x_1,y_1,q_1 = -1.1, 0.2, 1
# (x1,y1) にある電荷から、点 (x,y) までの距離
r_1=np.sqrt((x-x_1)**2+(y-y_1)**2)
# 点電荷の座標 (x2,y2), 電荷 q2
x_2,y_2,q_2 = 1, -0.9, -1
# (x2,y2) にある電荷から、点 (x,y) までの距離
r_2=np.sqrt((x-x_2)**2+(y-y_2)**2)
# 静電ポテンシャル phi は
phi=1/k*(q_1/r_1+q_2/r_2)
# 電場ベクトル Ex , Ey
E_y,E_x =np.gradient(phi, ds)
# x,yの描画範囲の設定
fig=plt.figure()
plt.xlim([-LX,LX])
plt.ylim([-LY,LY])
# グラフ描画
plt.grid()
plt.plot(x_1,y_1,'o',color='b')
plt.text(x_1+0.1,y_1+0.1,r'$q_1=+1$',color='b')
plt.plot(x_2,y_2,'o',color='r')
plt.text(x_2+0.1,y_2+0.1,r'$q_2=-1$',color='r')
# 電場ベクトルをプロット (+) から (-) に向くようにベクトルの向きを反対に
plt.streamplot(x,y,-E_x,-E_y,linewidth=0.3)
# タイトル
plt.text(x_1-0.2,1.5,"電場ベクトル表示",fontsize=25,color='m')
# ファイル保存
fig.savefig("electric_field.png")
plt.show()
# 電荷密度の計算
div_E=E_x-E_y
# 電荷密度の等高線をプロット
# x,yの描画範囲の設定
fig, ax = plt.subplots()
plt.xlim([-LX,LX])
plt.ylim([-LY,LY])
# グラフ描画
plt.grid()
#plt.plot(x_1,y_1,'o',color='b')
plt.text(x_1+0.1,y_1+0.1,r'$q_1=+1$',color='b')
#plt.plot(x_2,y_2,'o',color='r')
plt.text(x_2+0.1,y_2+0.1,r'$q_2=-1$',color='r')
# 電荷分布
CS = ax.contourf(x, y, div_E)
#fig.colorbar(CS)
# タイトル
plt.text(x_1,1.5,"電荷密度分布",fontsize=25,color='m')
# ファイル保存
fig.savefig("charge_distribution-2.png")
plt.show()







 式(2)より
式(2)より













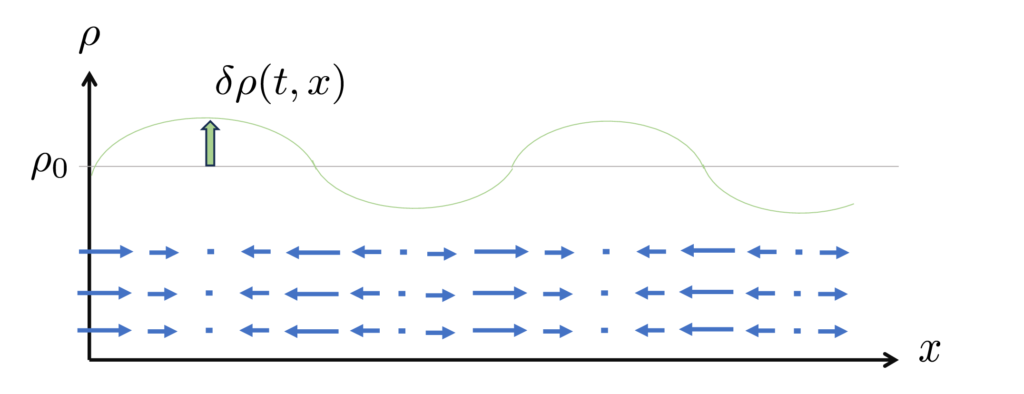 \(x\,\)軸方向に伝搬する平面波の音波について考える。全体の密度は\(\,\rho_0\,\)一定とする。ここで、密度が微小に変化した場合を考える。
\(x\,\)軸方向に伝搬する平面波の音波について考える。全体の密度は\(\,\rho_0\,\)一定とする。ここで、密度が微小に変化した場合を考える。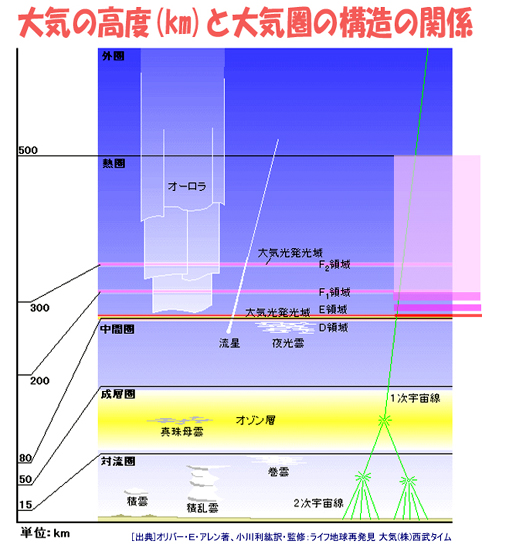
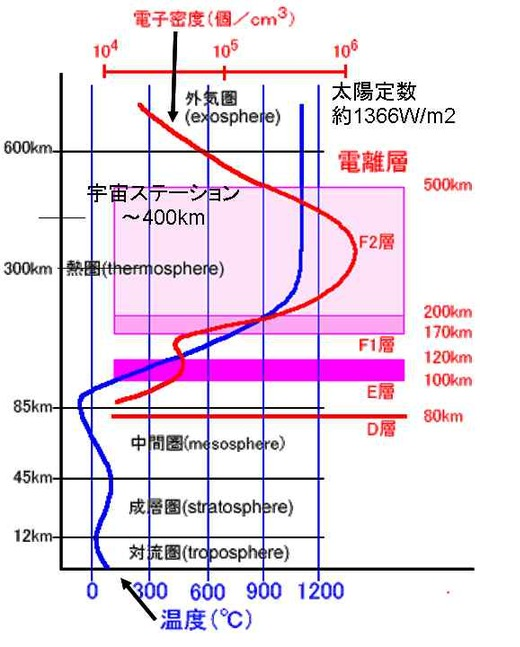
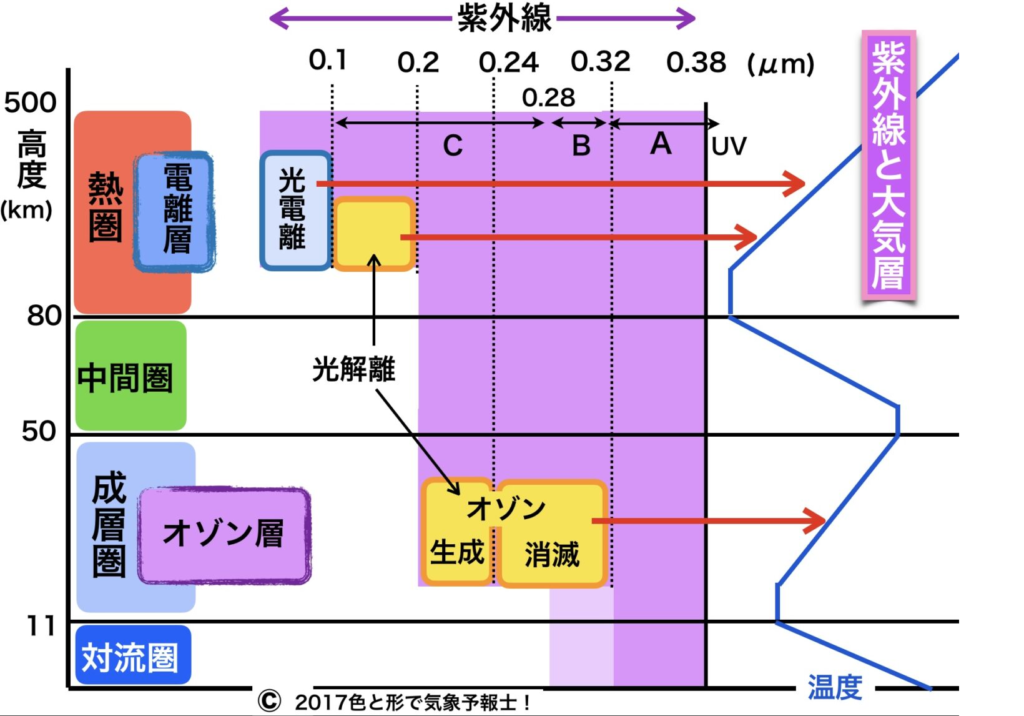

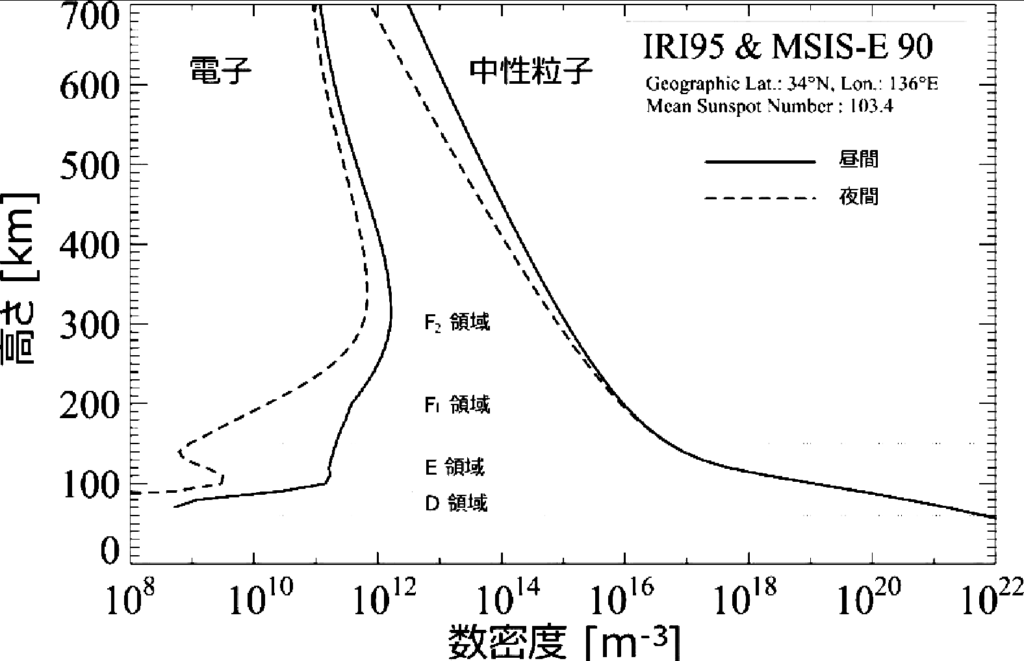 電離圏の電子密度は\(\,\,10^{11}\sim 10^{12}\,[\mathrm{m}^{-3}]\,\,\)なので、プラズマ振動数は数Mhz~数十Mhz となり、短波(HF)が反射されることで、地球の裏側への通信が可能となる。
電離圏の電子密度は\(\,\,10^{11}\sim 10^{12}\,[\mathrm{m}^{-3}]\,\,\)なので、プラズマ振動数は数Mhz~数十Mhz となり、短波(HF)が反射されることで、地球の裏側への通信が可能となる。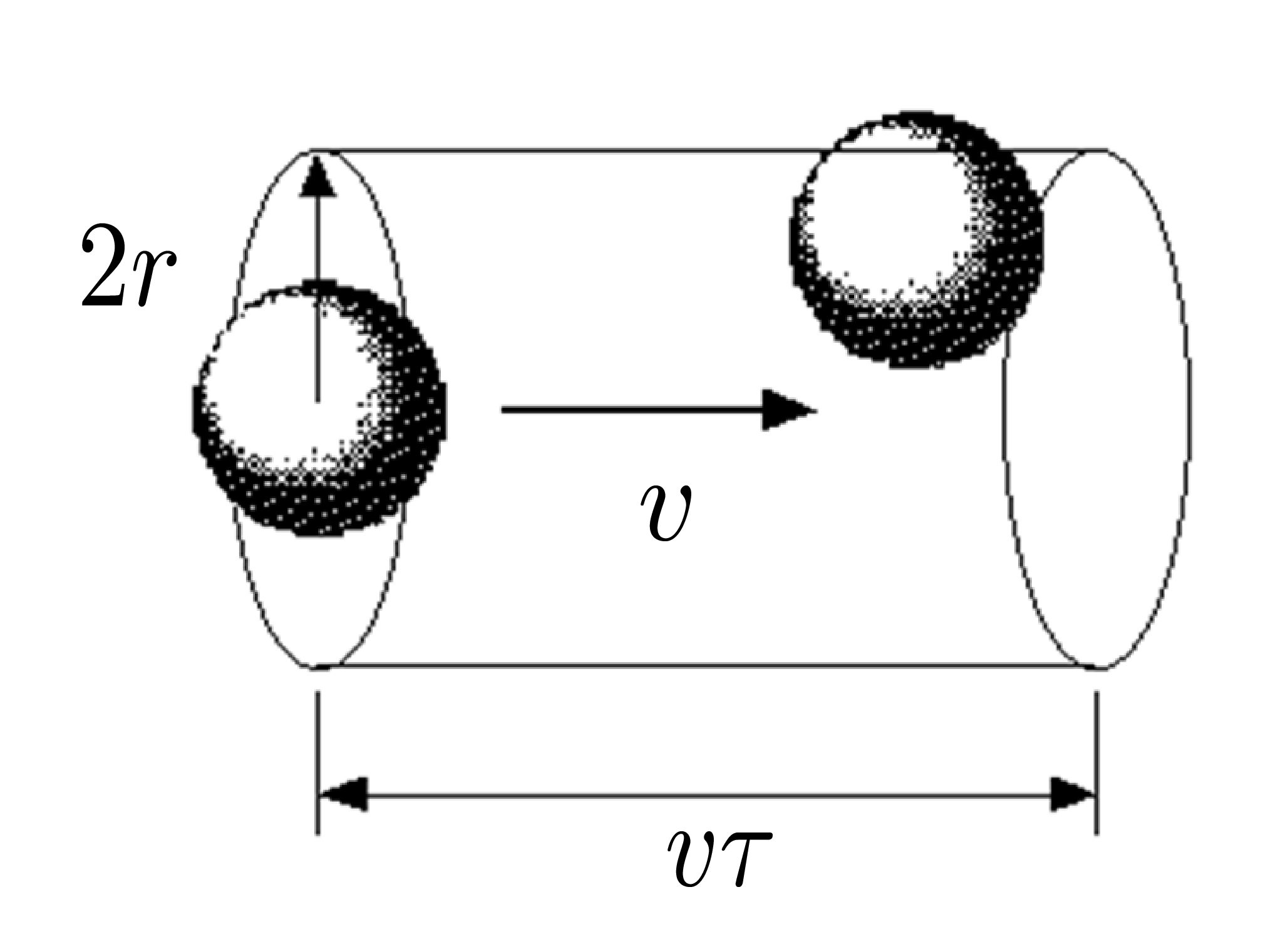 これは速度空間が十分に緩和して、連続体として見なせる状態である。気体を1種類の分子からなっており、半径\(\,r\,\)の剛体球で、ある分子1個が一定の速さ\(\,v\,\)で運動し、他の分子は静止しているという前提で衝突を考える。
これは速度空間が十分に緩和して、連続体として見なせる状態である。気体を1種類の分子からなっており、半径\(\,r\,\)の剛体球で、ある分子1個が一定の速さ\(\,v\,\)で運動し、他の分子は静止しているという前提で衝突を考える。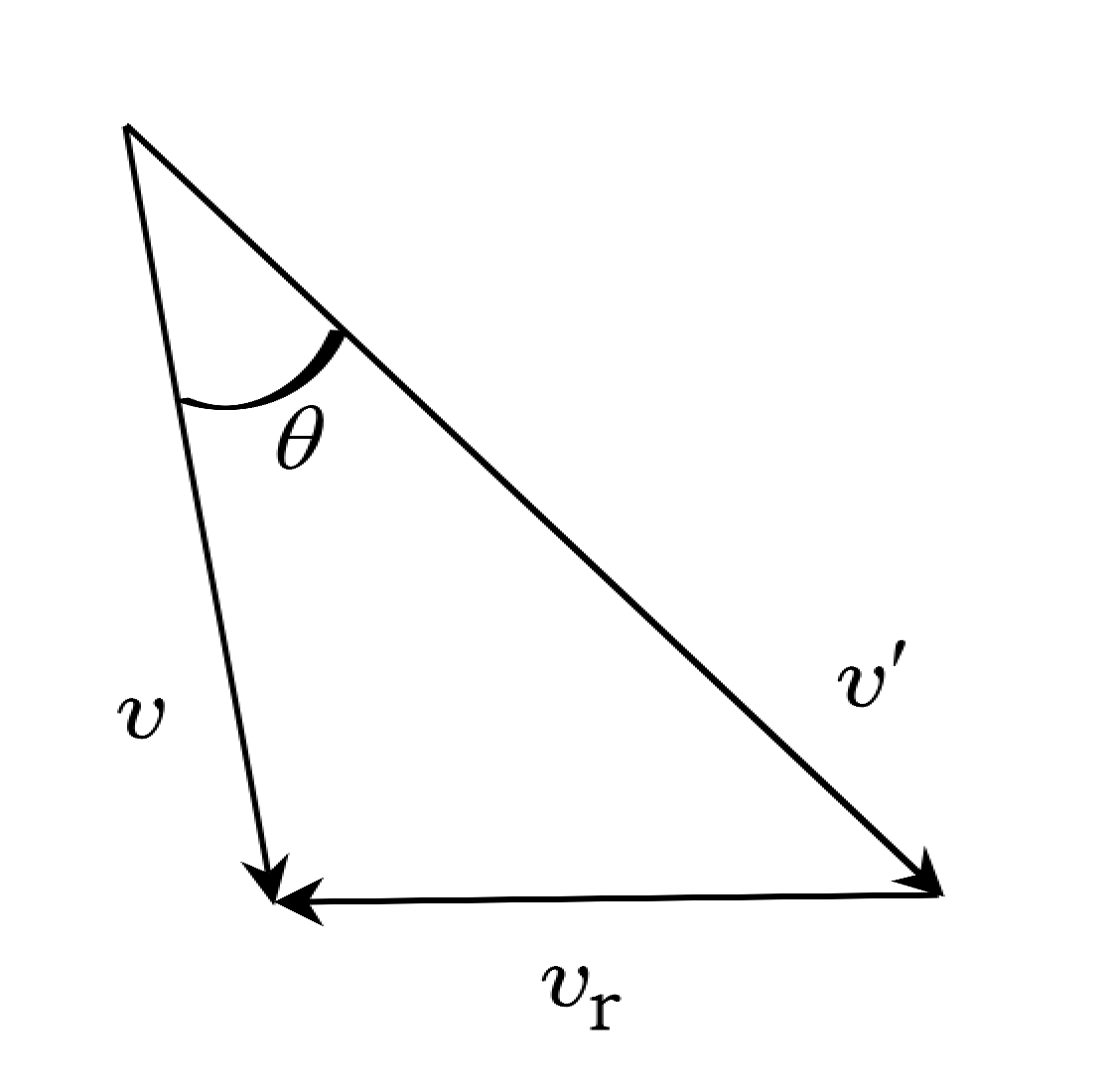 \(\star\,\)まず、全部の分子が同じ速度で運動している場合を考える。
\(\star\,\)まず、全部の分子が同じ速度で運動している場合を考える。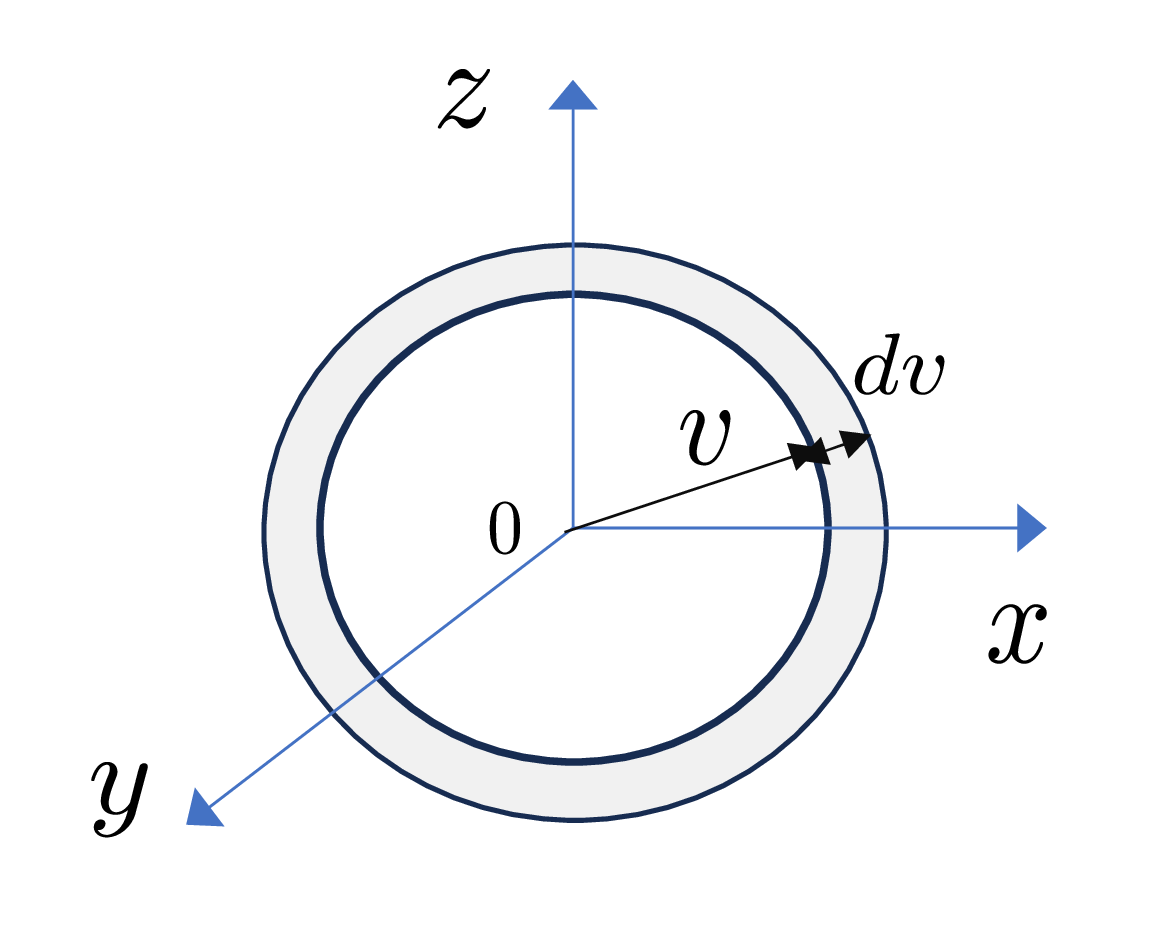 速度空間において、速さが\(\,v\,\)と\(\,v+dv\,\)の間にある分子数を求める。そのためには\(F(v_x,v_y,v_z)dv_xdv_ydv_z\,\)を\(\,v\,\)と\(\,v+dv\,\)の間にある部分について\(\,v_x,v_y,v_z\,\)の積分をする。
速度空間において、速さが\(\,v\,\)と\(\,v+dv\,\)の間にある分子数を求める。そのためには\(F(v_x,v_y,v_z)dv_xdv_ydv_z\,\)を\(\,v\,\)と\(\,v+dv\,\)の間にある部分について\(\,v_x,v_y,v_z\,\)の積分をする。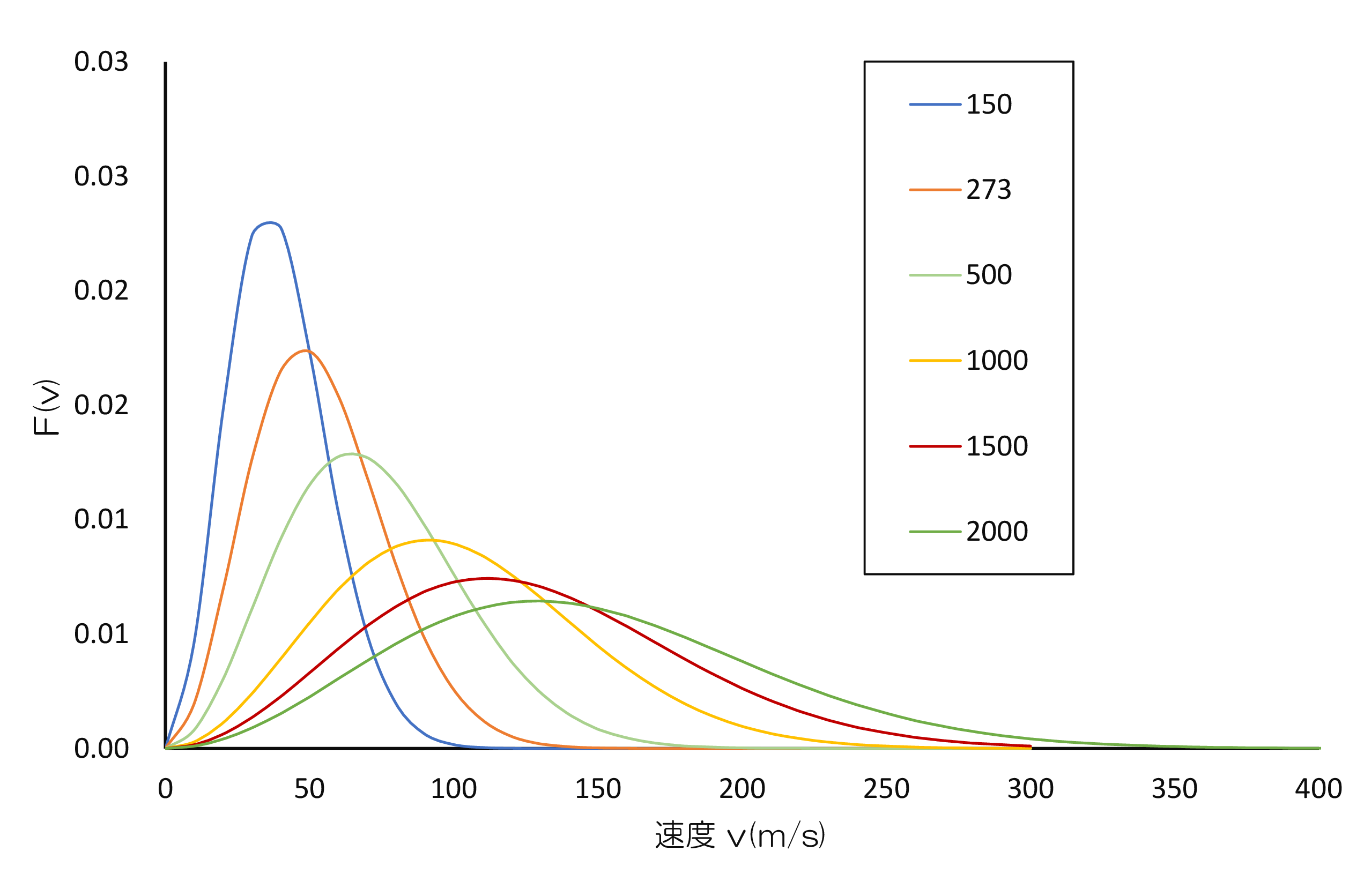












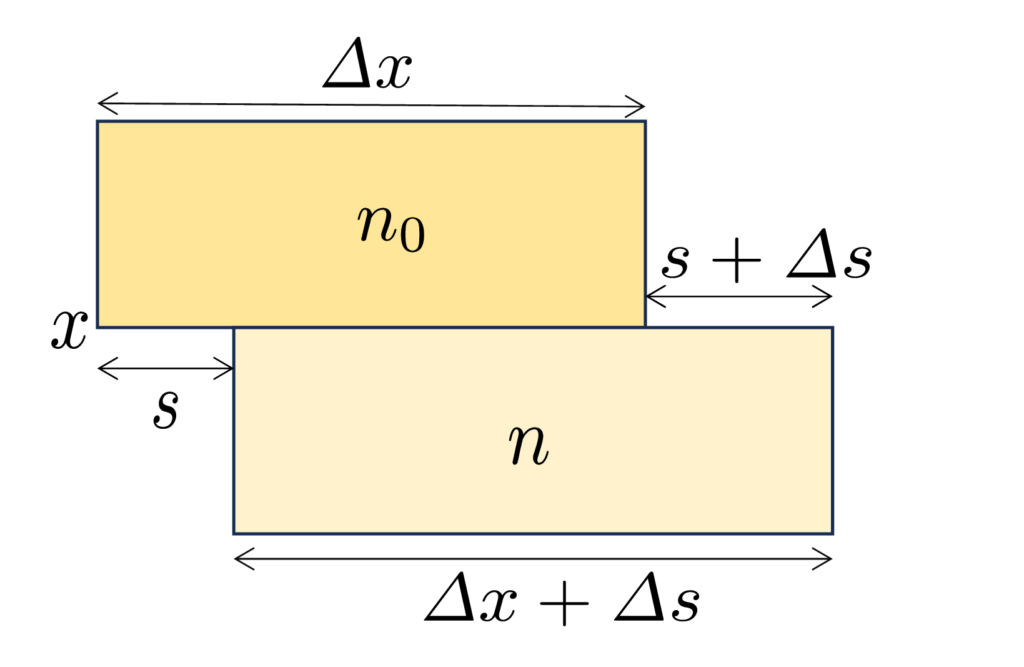
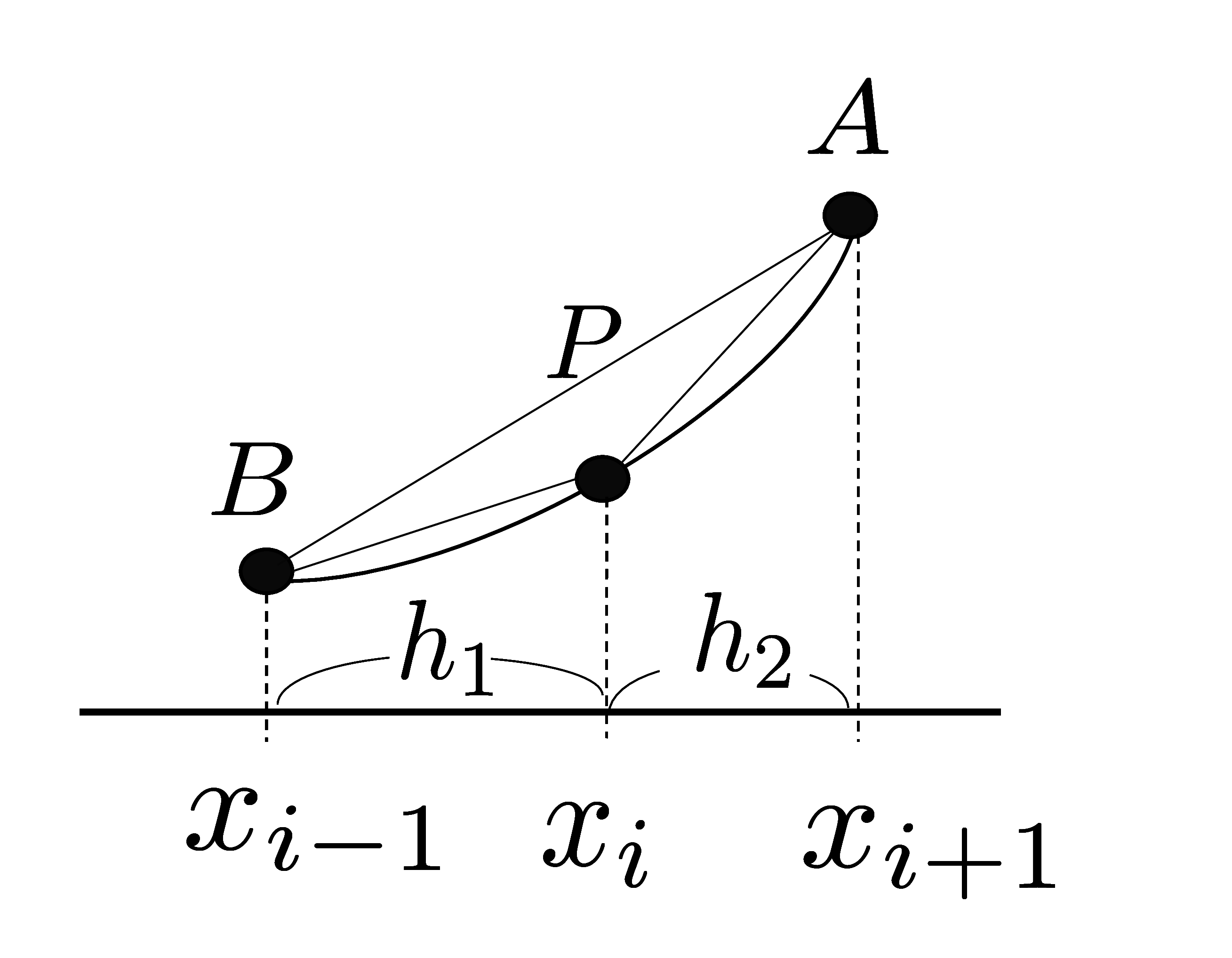 関数 \(f(x)\,\)の\(\,x=x_i\,\)における微分は
関数 \(f(x)\,\)の\(\,x=x_i\,\)における微分は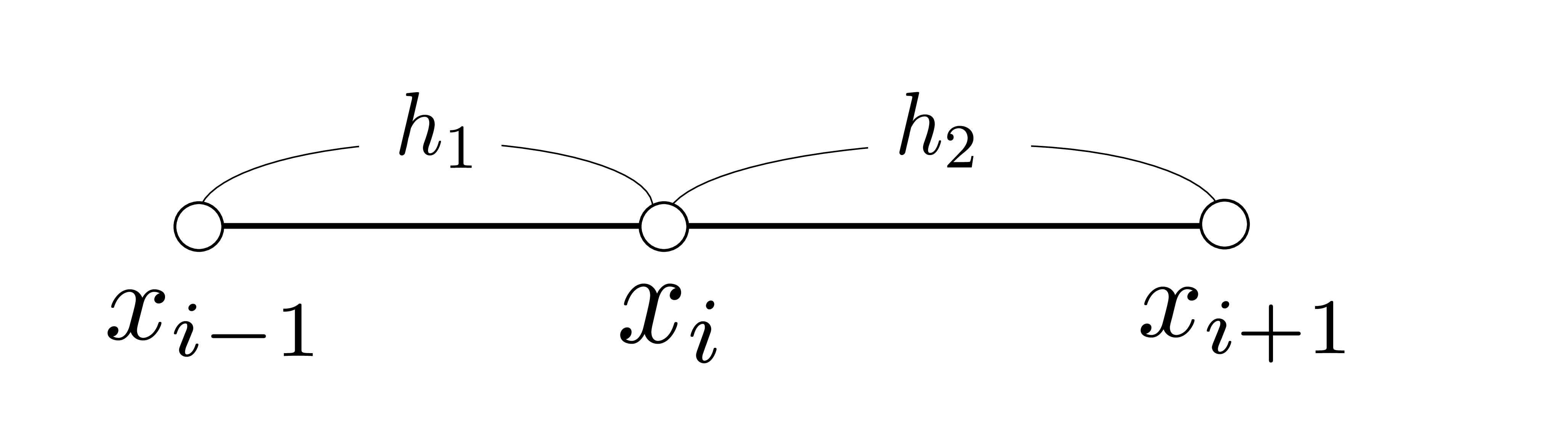 左図のような\(\,h_1\ne h_2\,\)の場合、不均等格子となる。三点の線形結合で微分を差分で表すことを考える。\(\,f(x_i)\,\)を\(\,f_i\,\)と表すこととする。
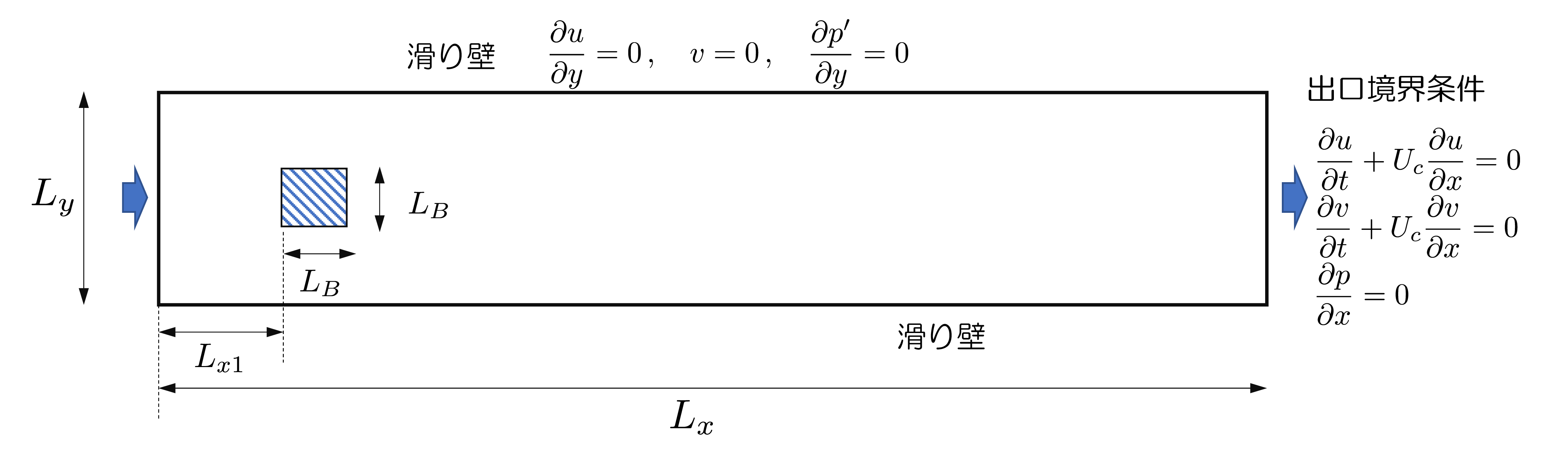
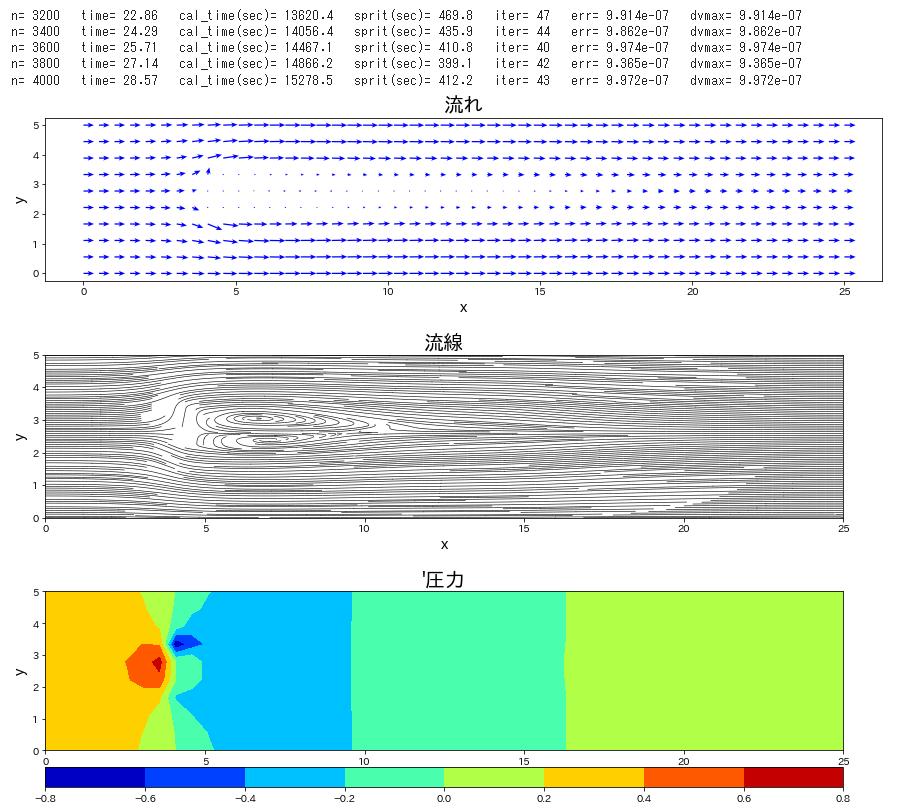
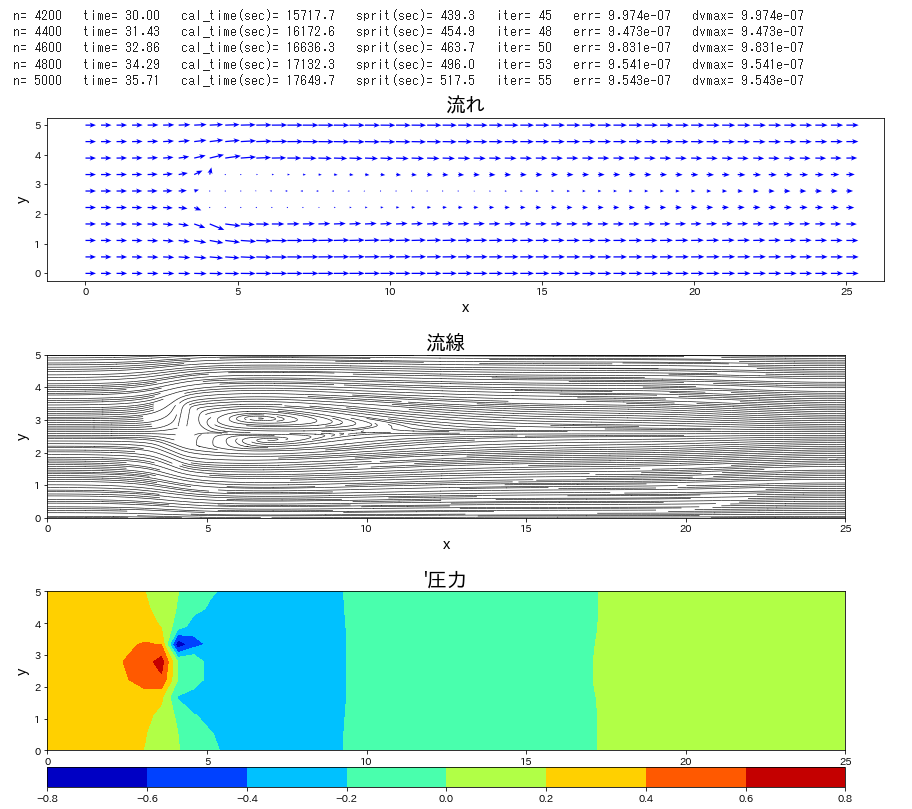
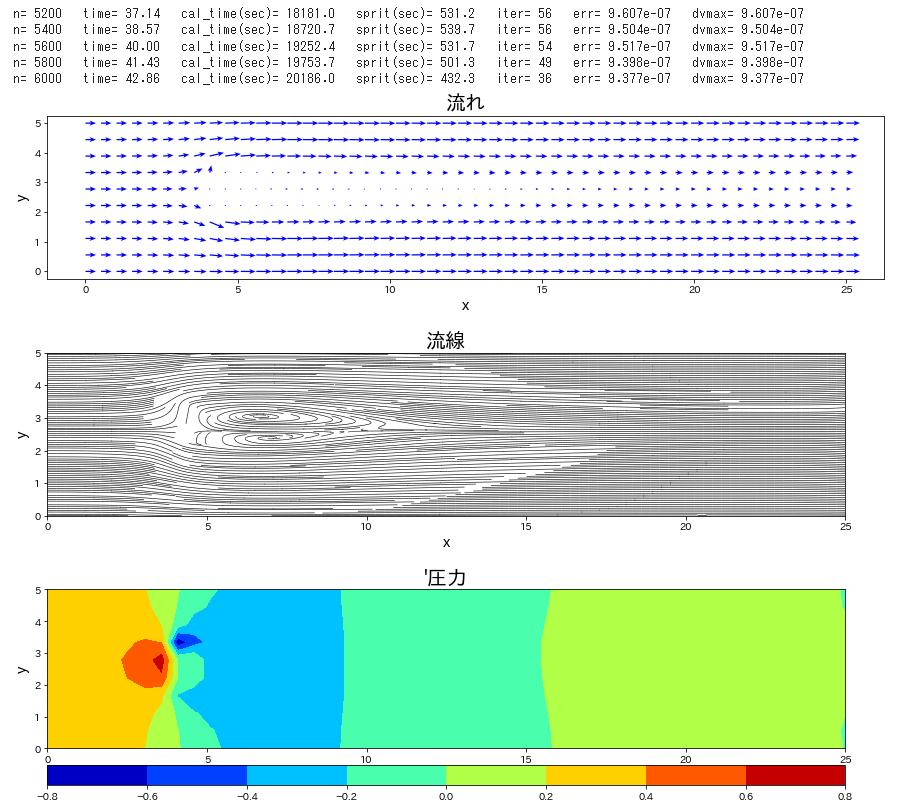
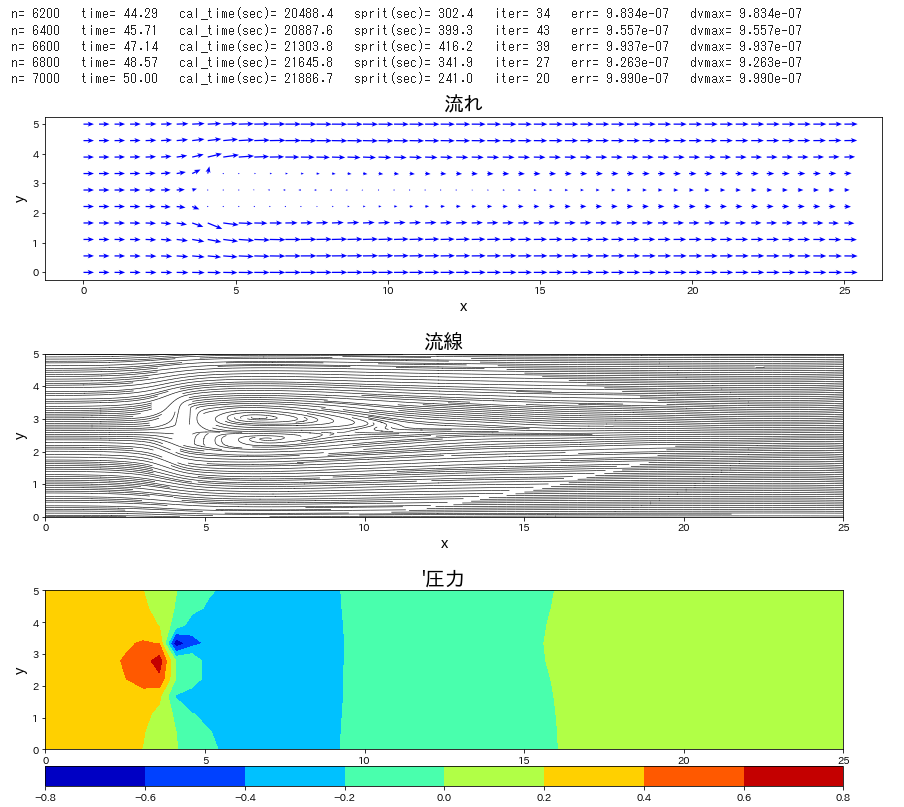
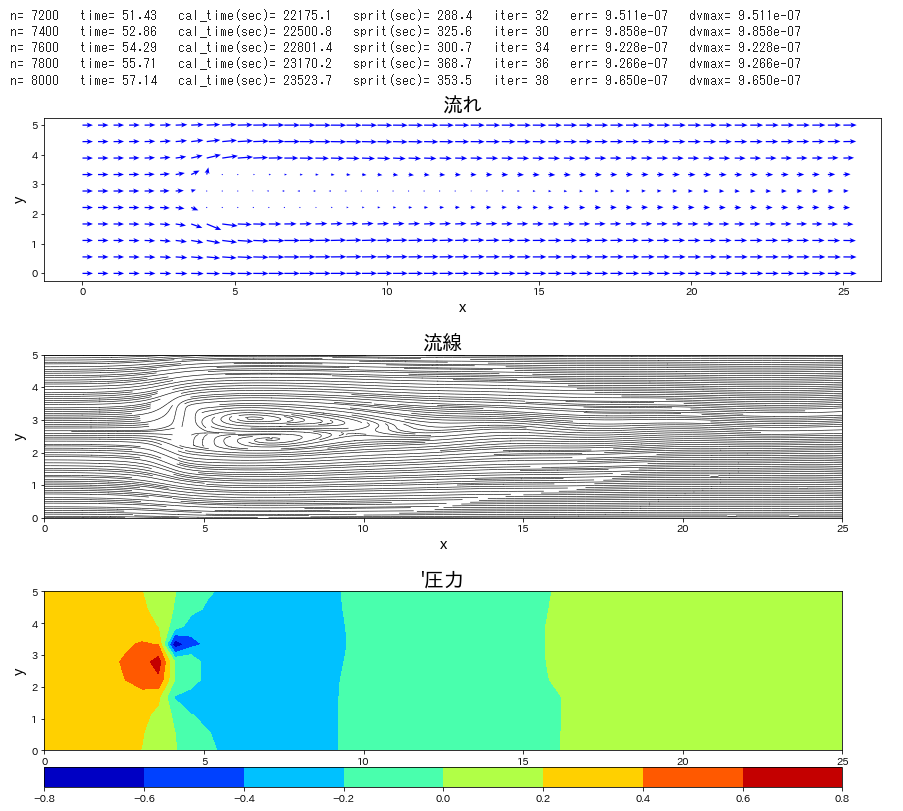
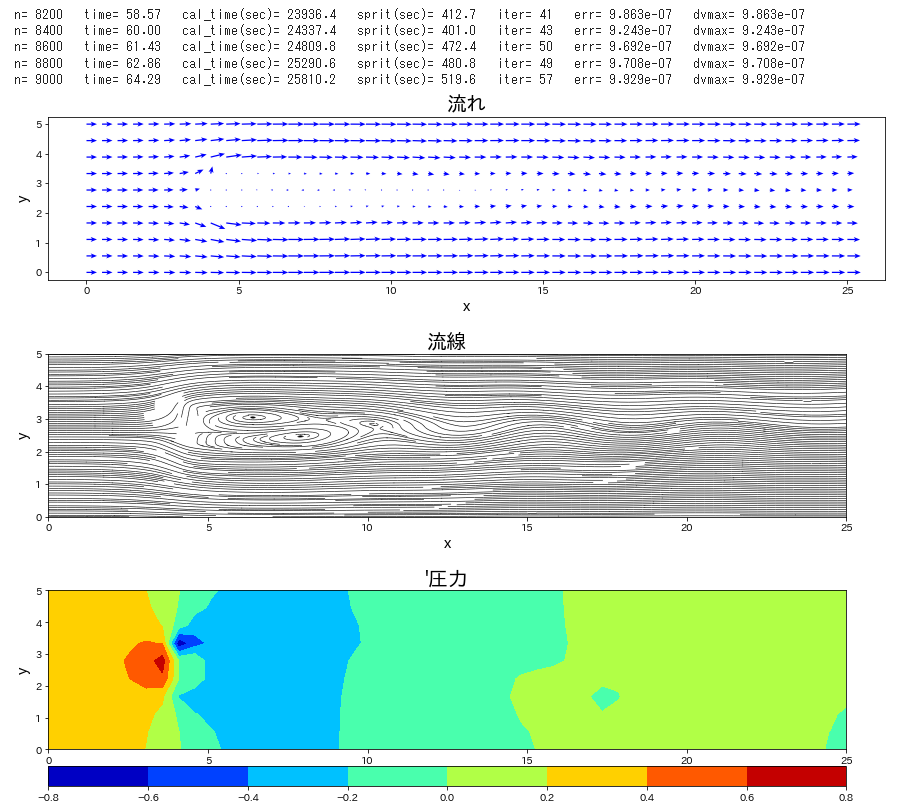
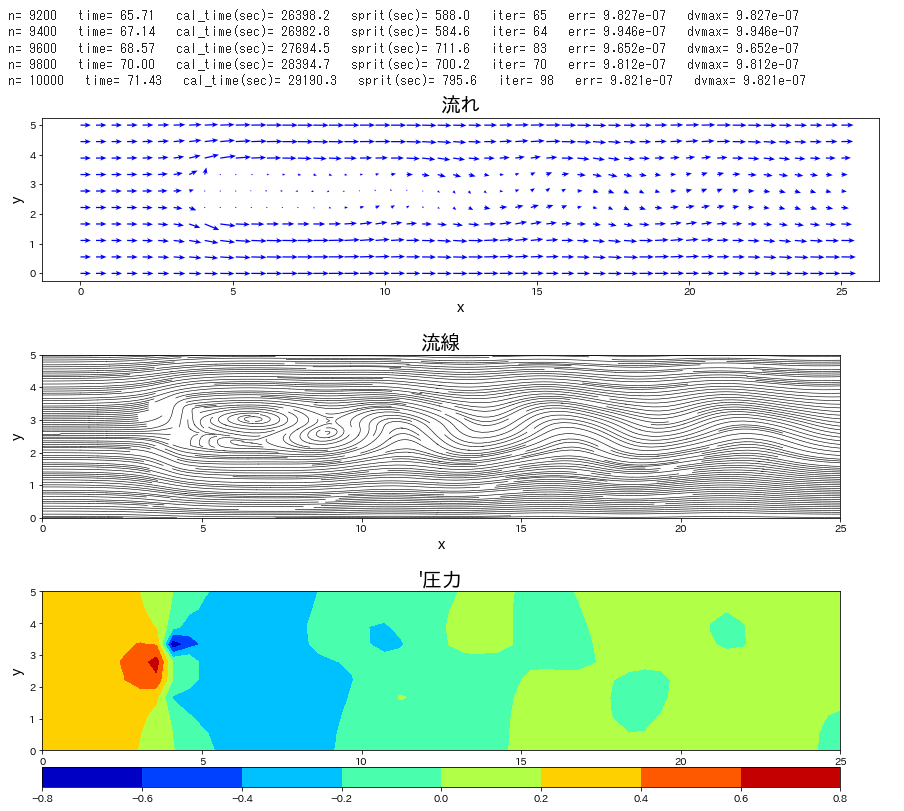
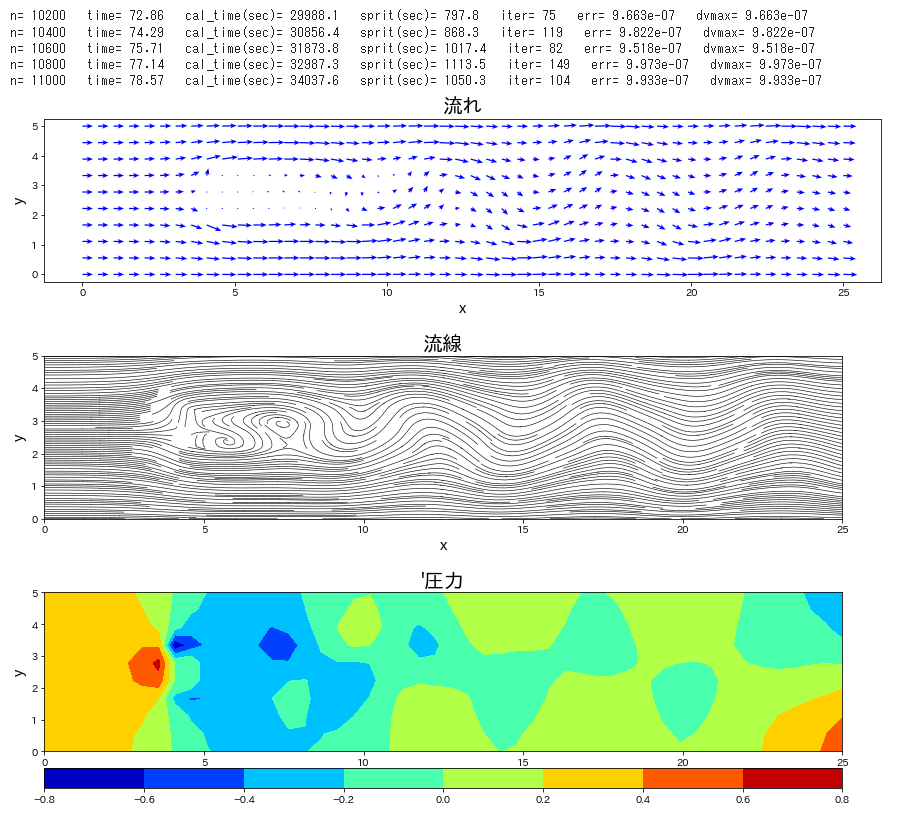
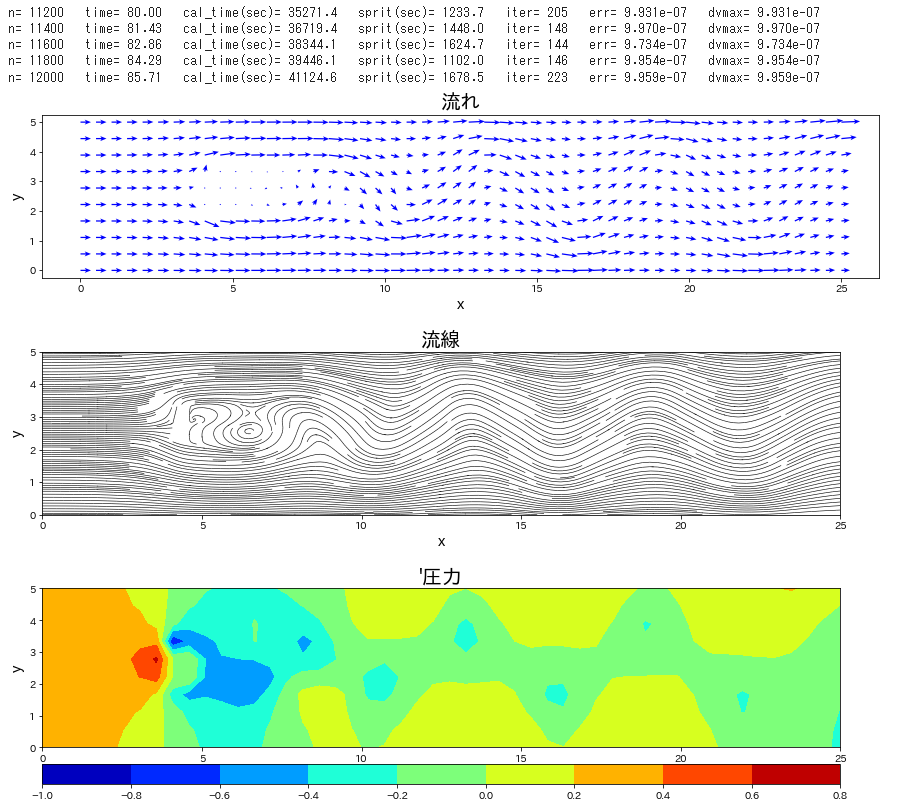
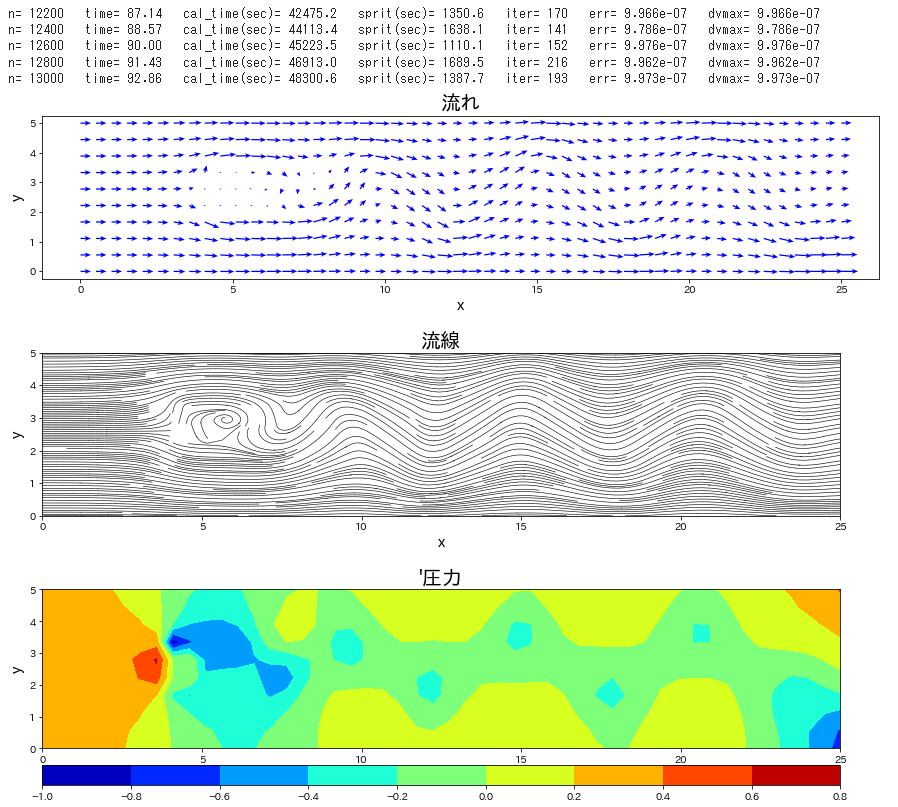
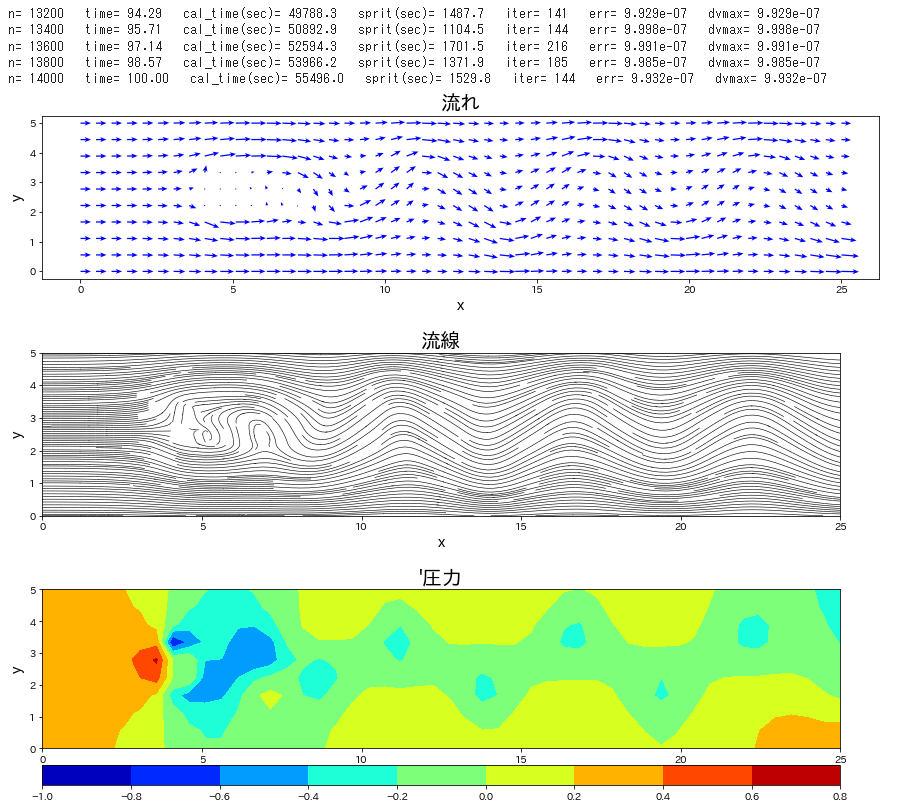
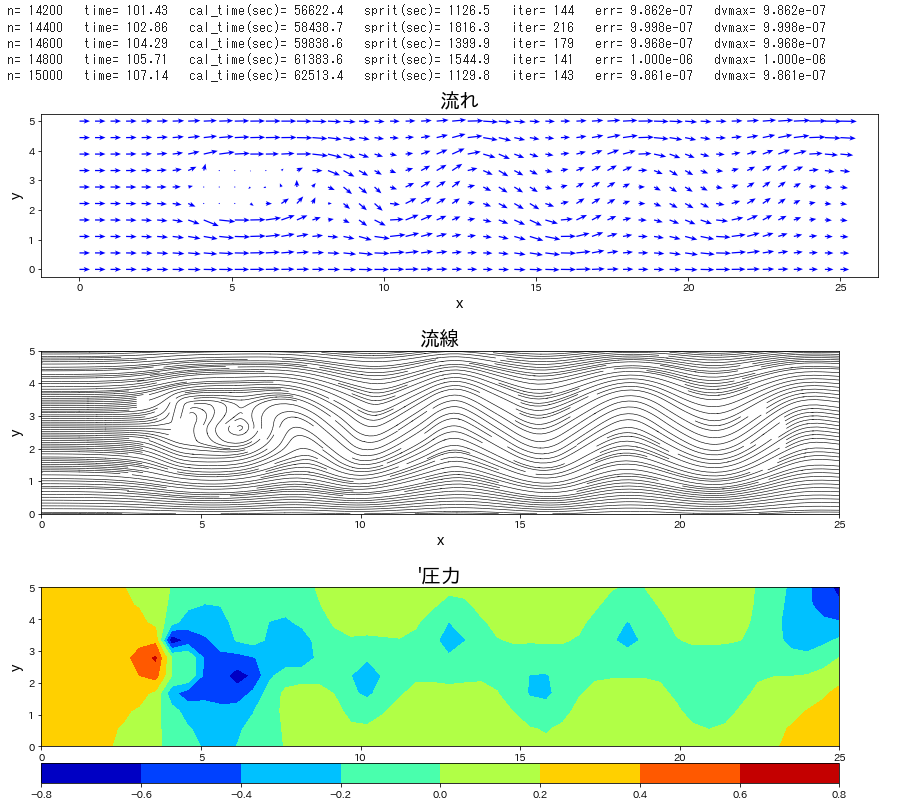
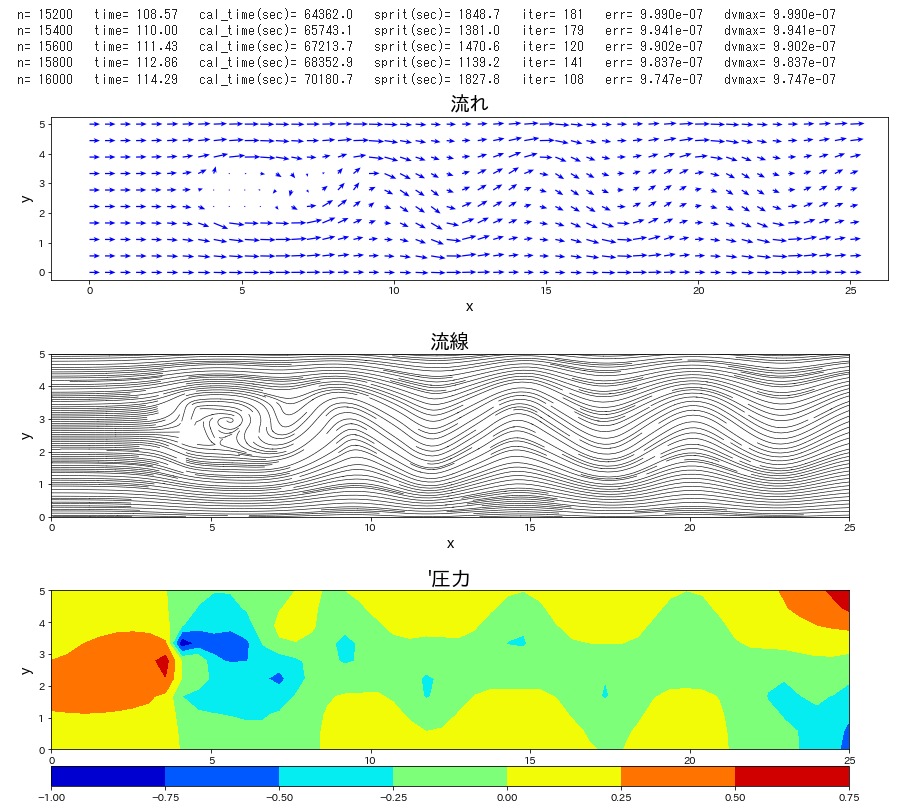
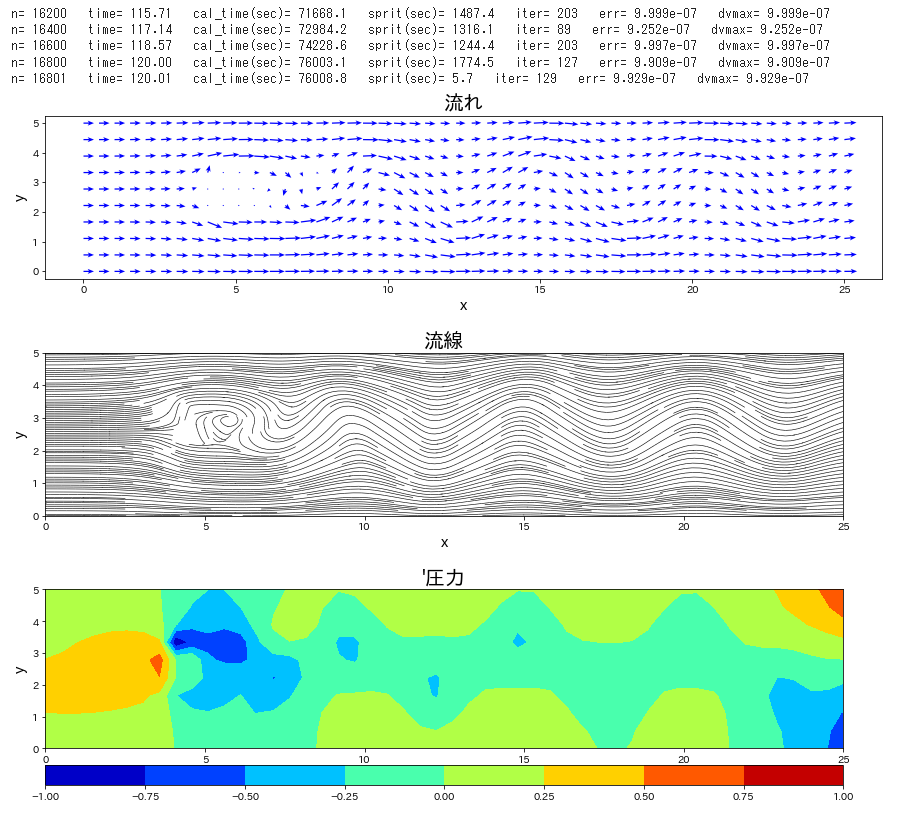
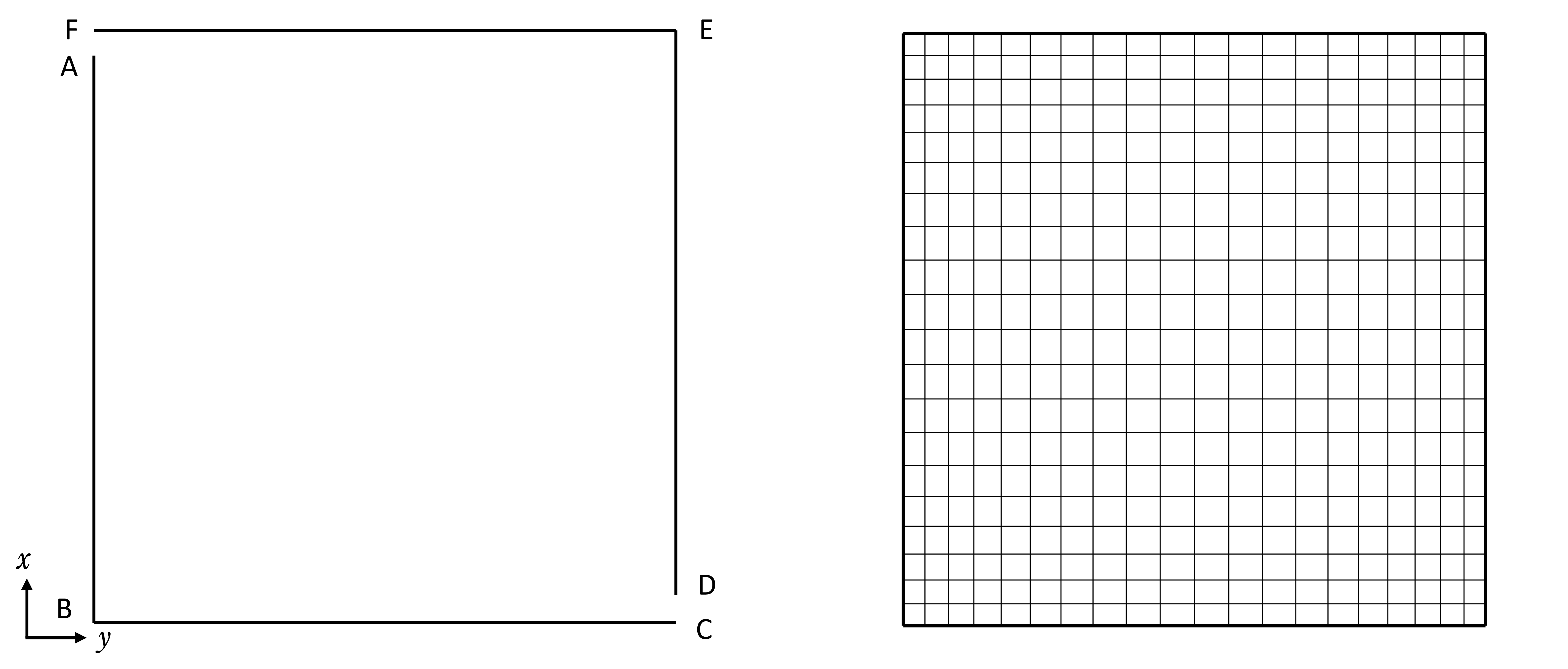
左図のような\(\,h_1\ne h_2\,\)の場合、不均等格子となる。三点の線形結合で微分を差分で表すことを考える。\(\,f(x_i)\,\)を\(\,f_i\,\)と表すこととする。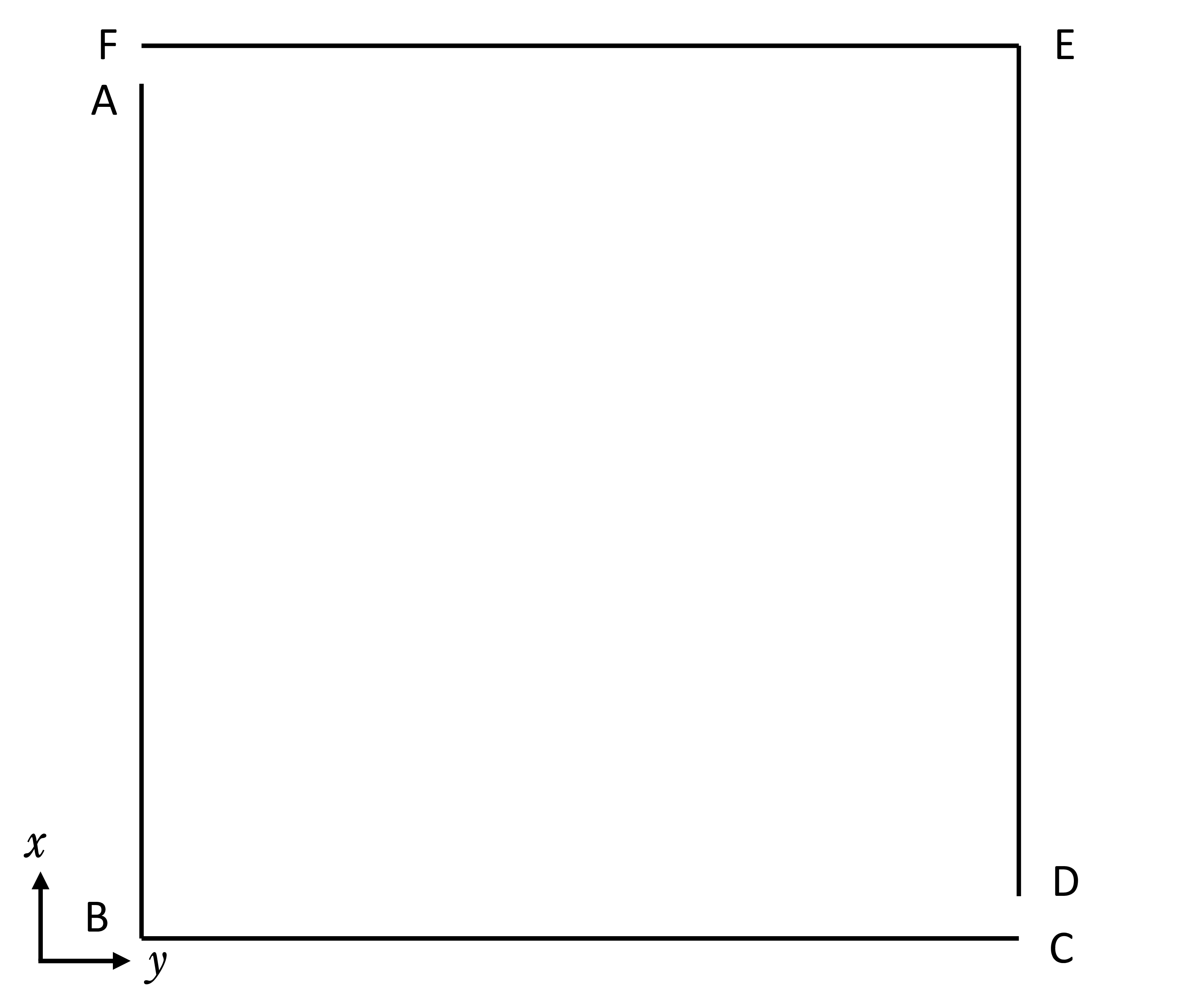 不均等格子を用いて、室内気流の層流解析を行う。河村先生の「流体解析の基礎」を参考にした。
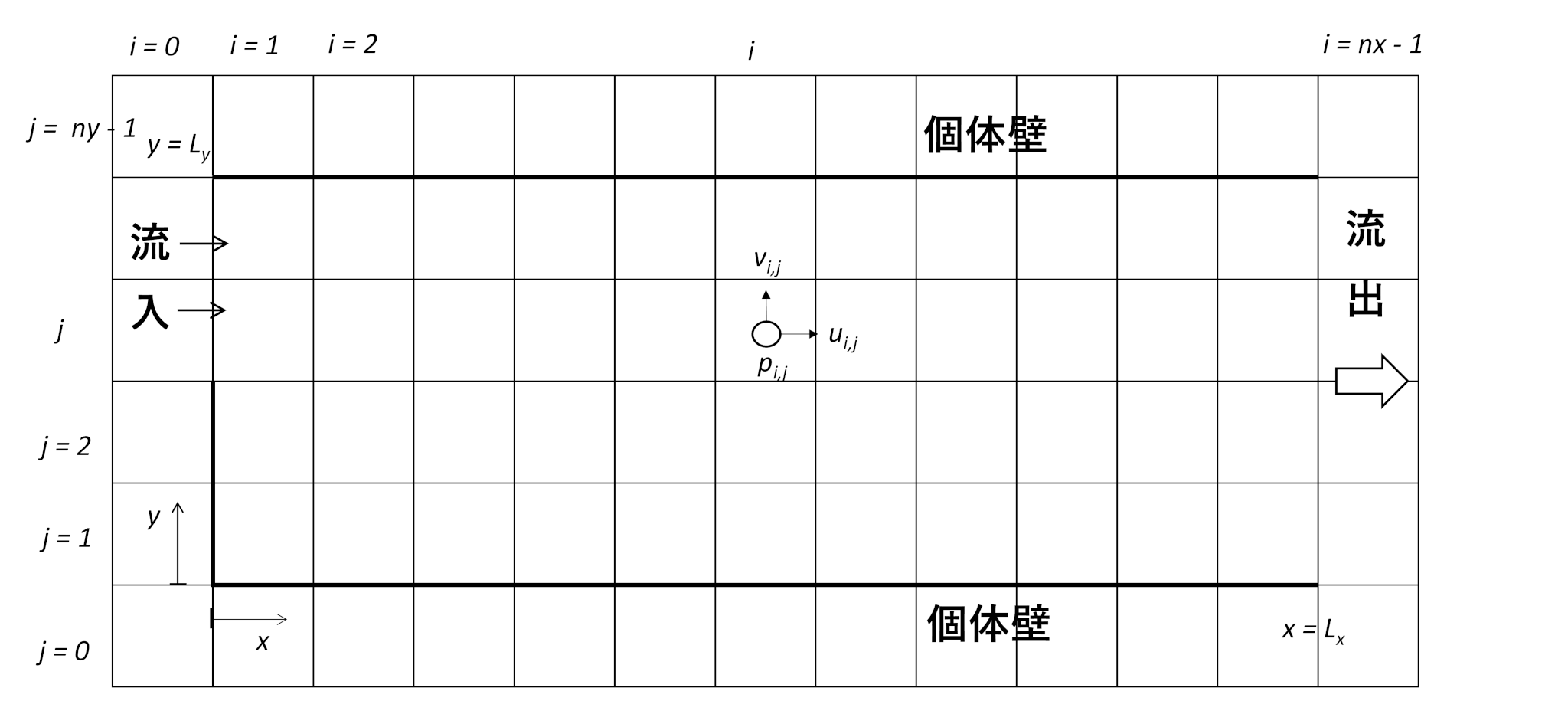
不均等格子を用いて、室内気流の層流解析を行う。河村先生の「流体解析の基礎」を参考にした。
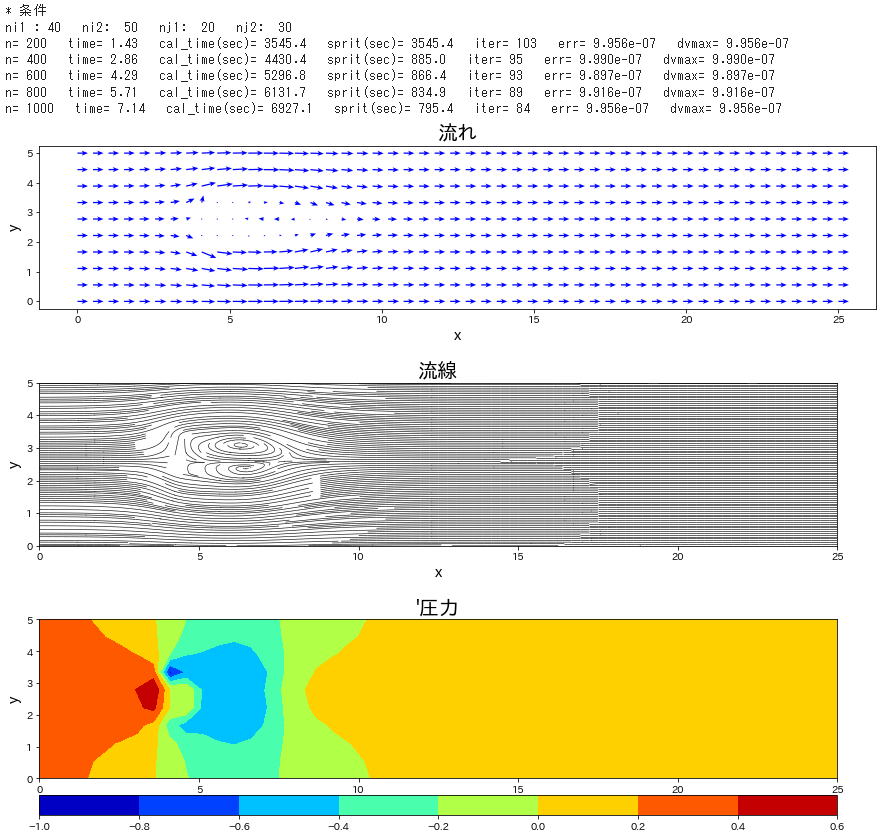
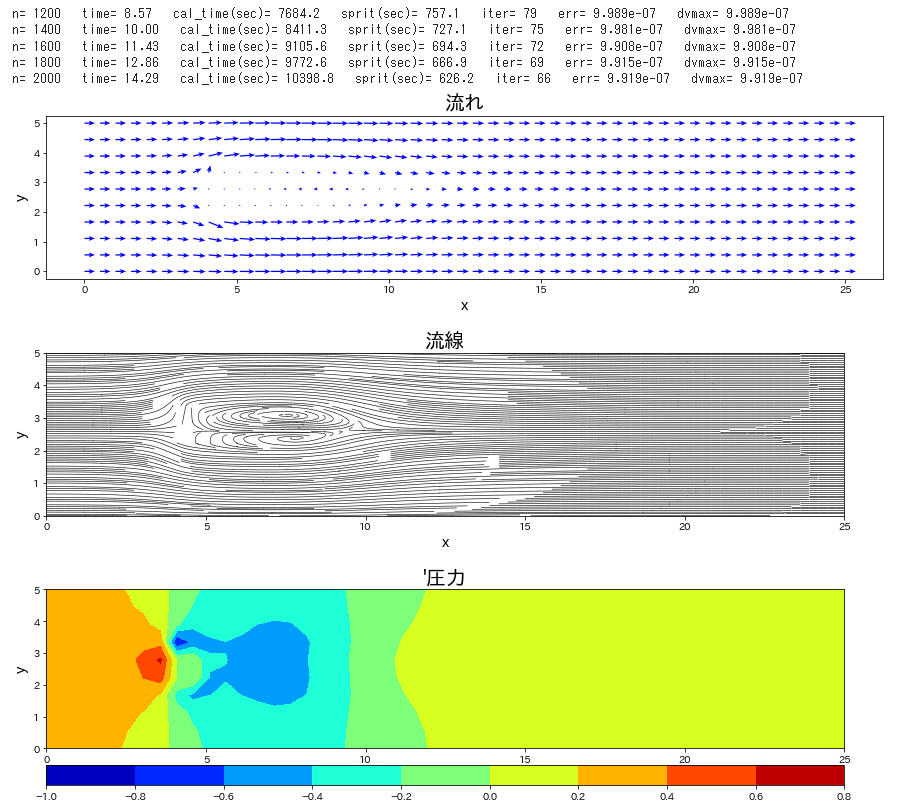
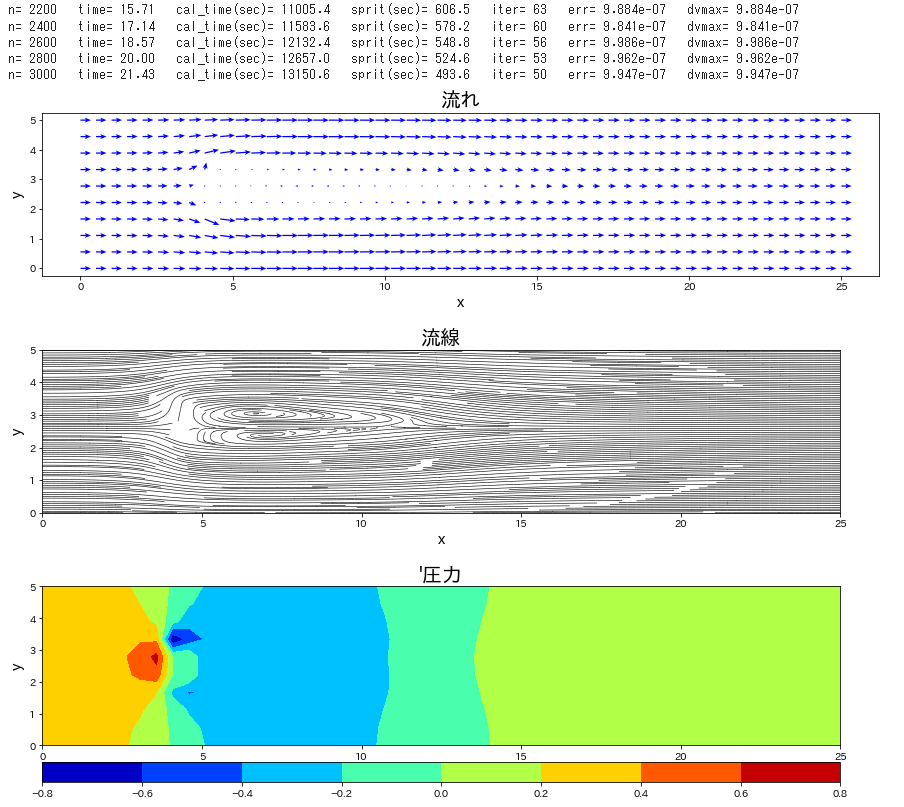
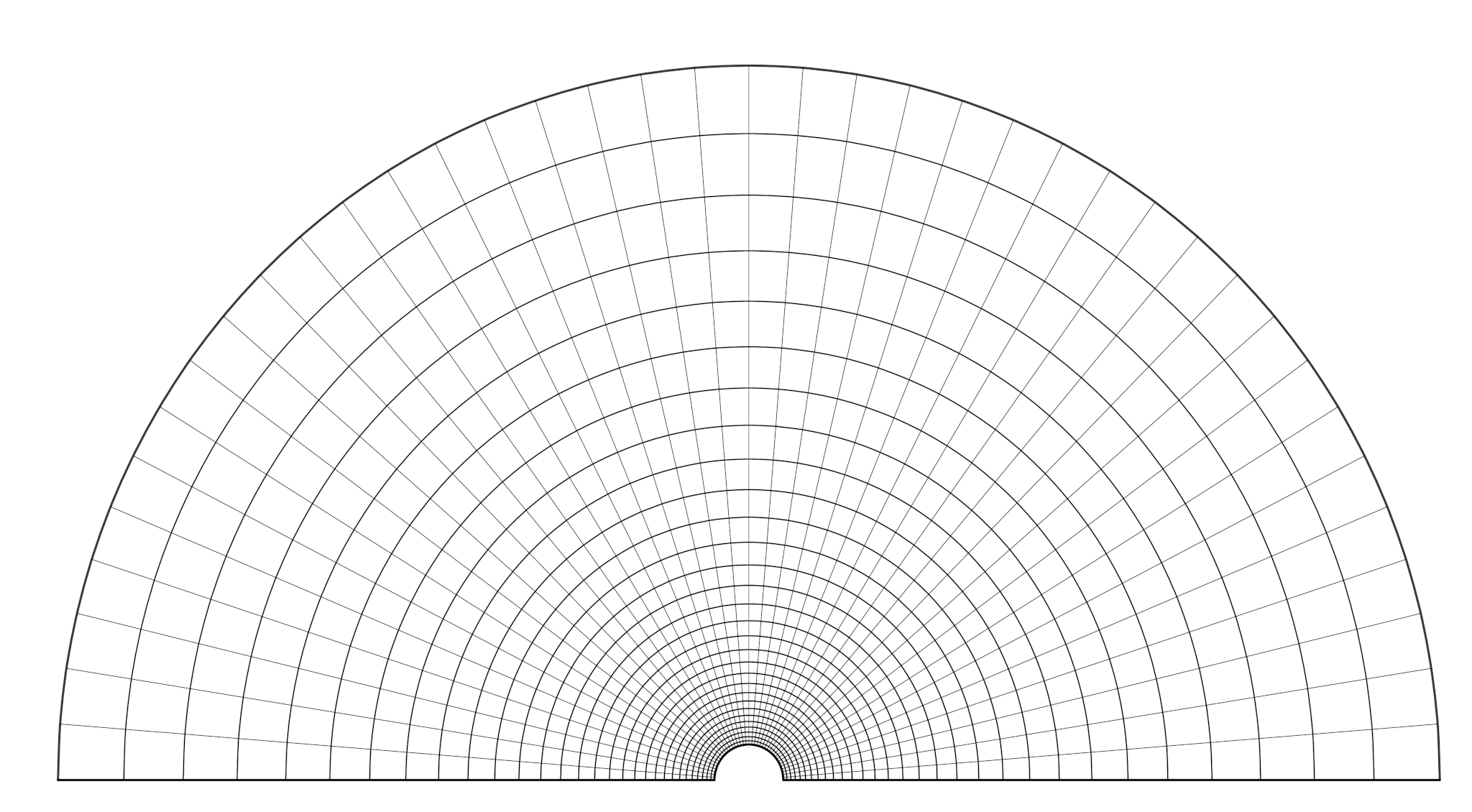
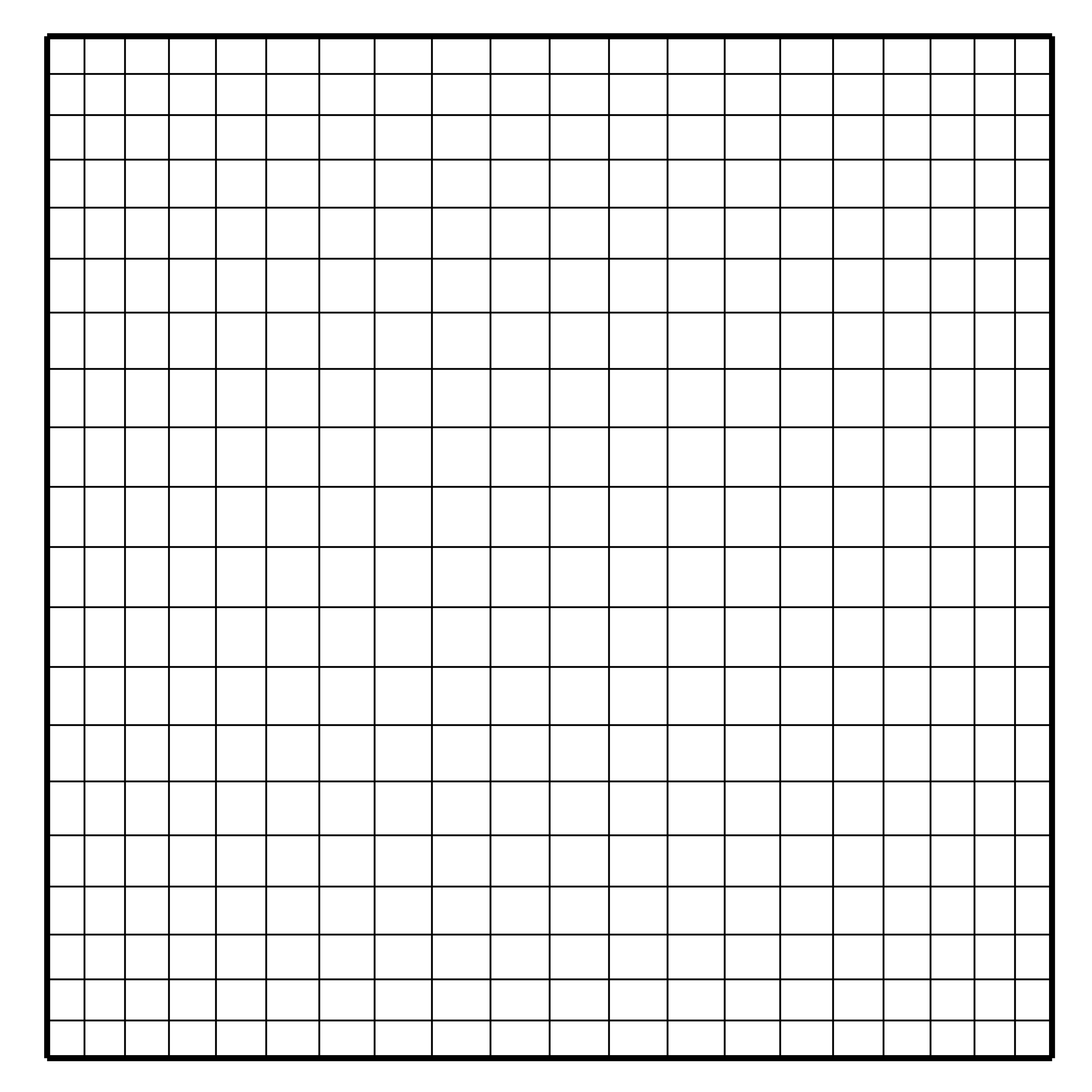 小さい流入や流出口の場合、ある程度の格子点を集める必要がある。このような場合は、流出流入口周りに格子点を集めるような不均等格子を用いる。今回は左の図のような格子を使用した。
小さい流入や流出口の場合、ある程度の格子点を集める必要がある。このような場合は、流出流入口周りに格子点を集めるような不均等格子を用いる。今回は左の図のような格子を使用した。














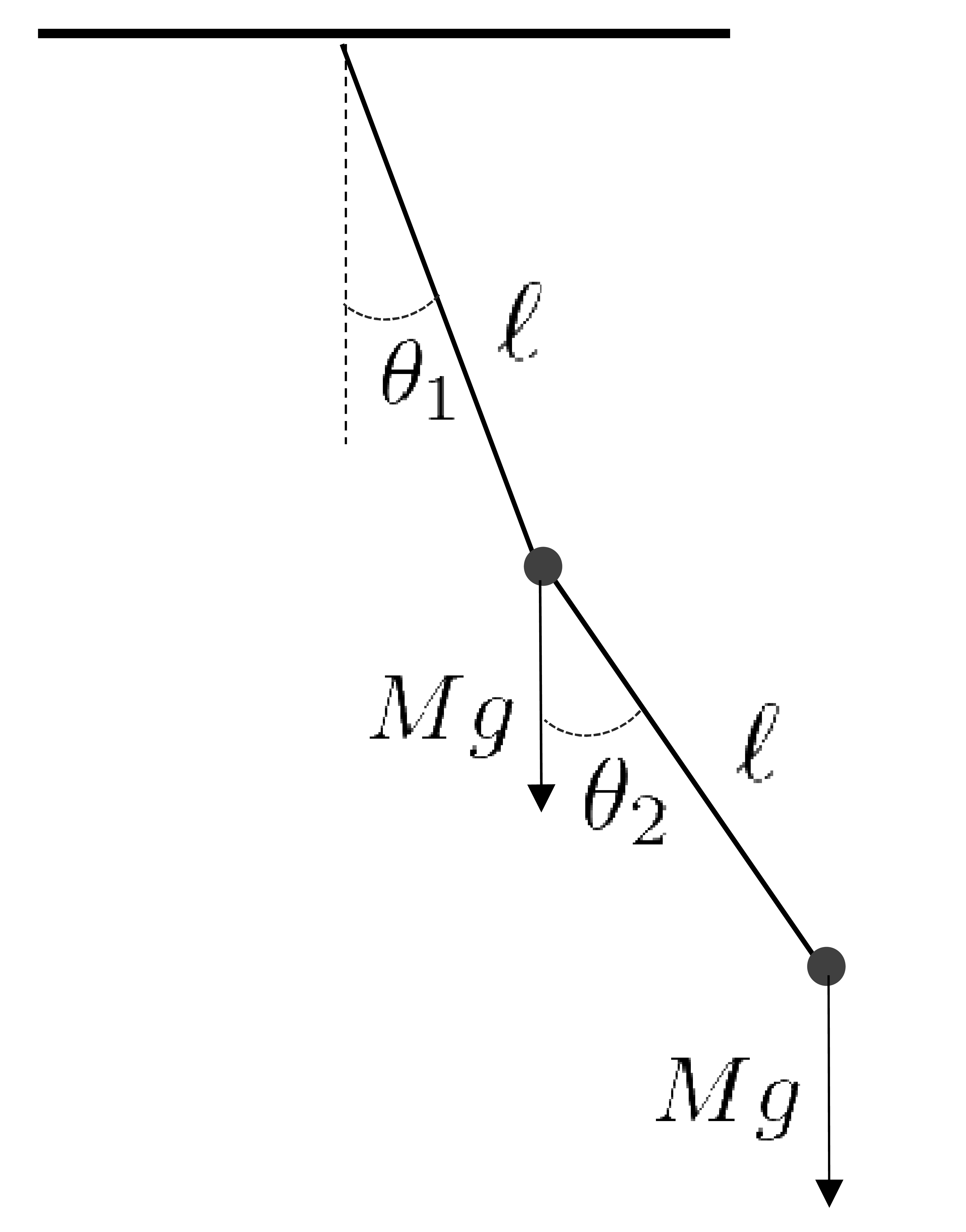 最初のオモリの座標を \((x_1,y_1)\,\) , そこから垂れ下がったオモリの座標を \((x_2,y_2)\,\) とする。
最初のオモリの座標を \((x_1,y_1)\,\) , そこから垂れ下がったオモリの座標を \((x_2,y_2)\,\) とする。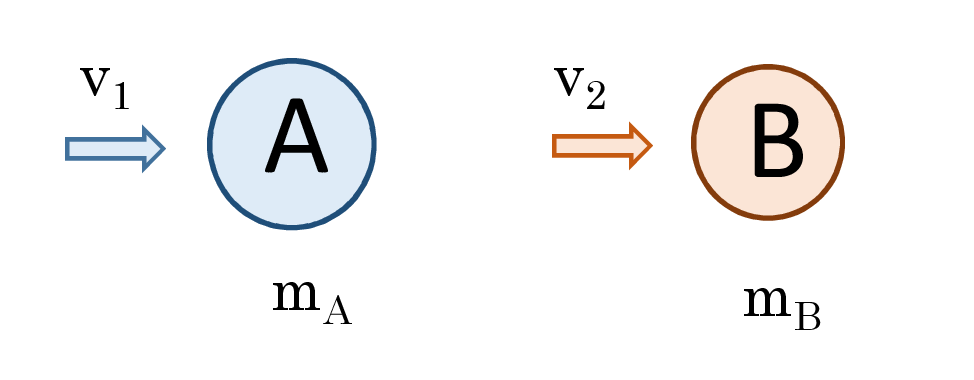
 (「ふりこのはたらき」 \(730\)円)
(「ふりこのはたらき」 \(730\)円)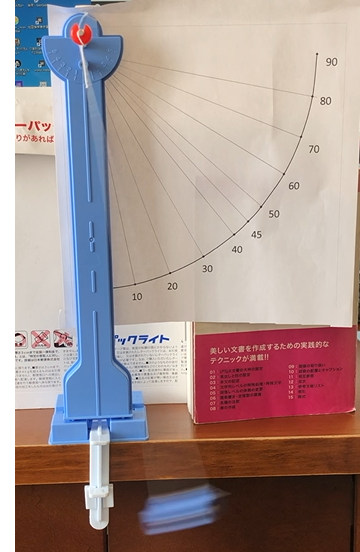 ひもの長さは\(30\)cmとして、振れ角測定用に角度を書いた紙を付けました。大きく振った位置から重りを降ろした。
ひもの長さは\(30\)cmとして、振れ角測定用に角度を書いた紙を付けました。大きく振った位置から重りを降ろした。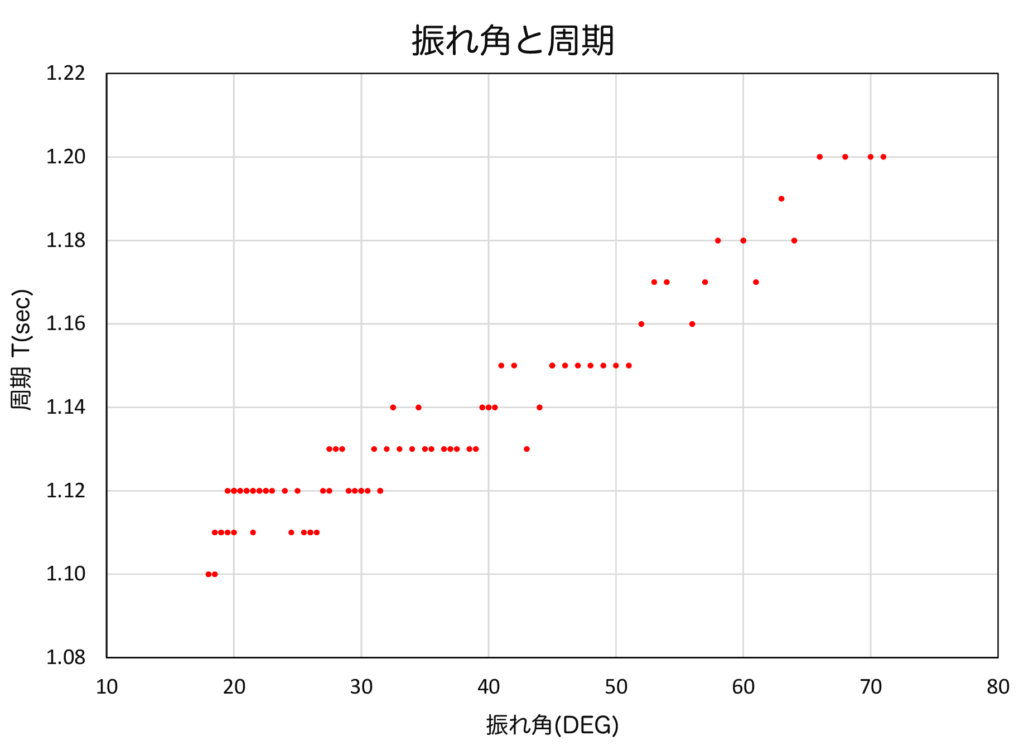
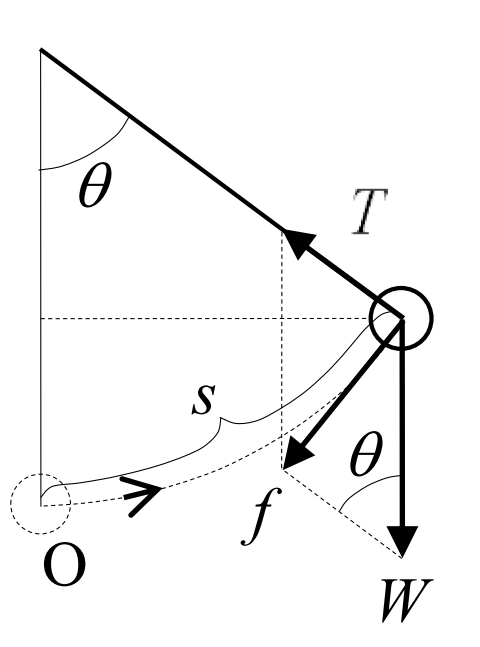 糸の張力\(\,T\,\)、重力\(\,W\,\)の合力\(\,f^{\prime\prime}\)が重りに掛かる。
糸の張力\(\,T\,\)、重力\(\,W\,\)の合力\(\,f^{\prime\prime}\)が重りに掛かる。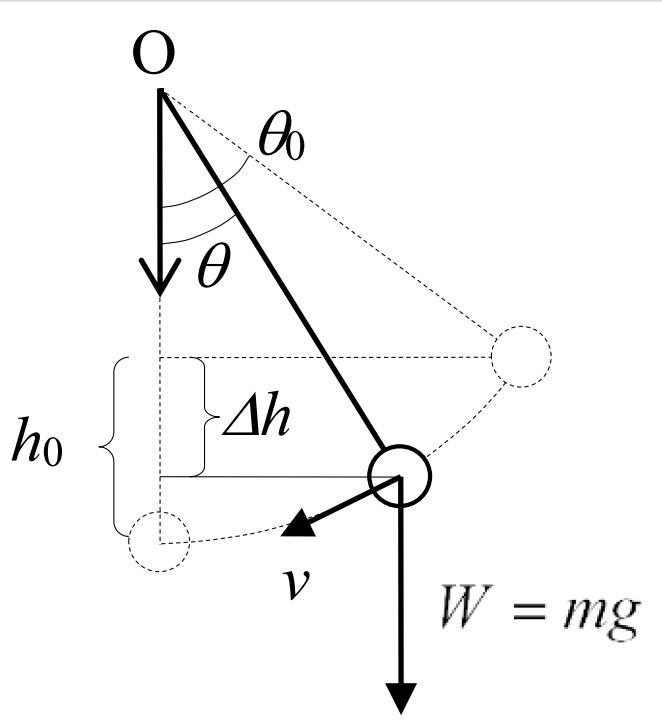 エネルギー保存則を用いて、振幅の大きい振り子の運動を計算する。振り子の最下点を原点とし、振りだし高さを\(\,h_0\,\)、\(\Delta h\,\)だけ降りた点の円周方向の速度を\(\,v\,\)とすると
エネルギー保存則を用いて、振幅の大きい振り子の運動を計算する。振り子の最下点を原点とし、振りだし高さを\(\,h_0\,\)、\(\Delta h\,\)だけ降りた点の円周方向の速度を\(\,v\,\)とすると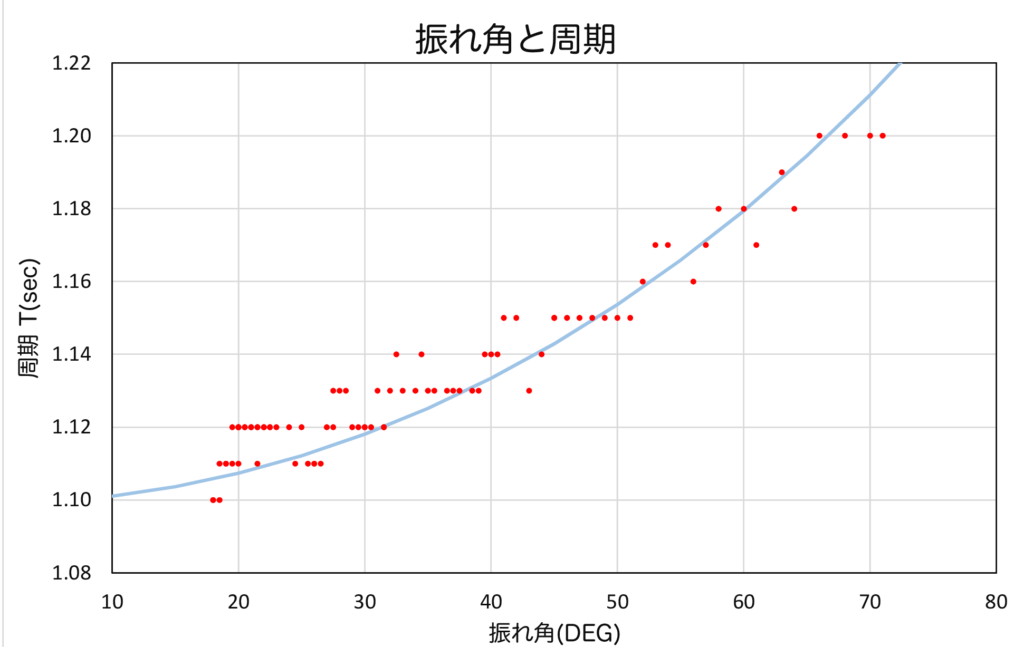
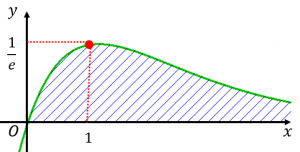 グラフは\(\,y=xe^{-x}\,\)である。\(x\,\to\,\infty\,\)まで積分すると斜線部分の面積は\(\,1\,\)となります。
グラフは\(\,y=xe^{-x}\,\)である。\(x\,\to\,\infty\,\)まで積分すると斜線部分の面積は\(\,1\,\)となります。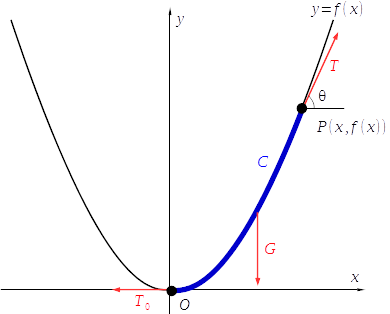 ひもの底を原点\(O\,\)とし、水平方向に\(x\,\)軸、鉛直方向に\(y\,\)軸をとる。ひもの曲線を\(\,y=f(x)\,\)とおいて関数\(\,f(x)\,\)を求める。
ひもの底を原点\(O\,\)とし、水平方向に\(x\,\)軸、鉛直方向に\(y\,\)軸をとる。ひもの曲線を\(\,y=f(x)\,\)とおいて関数\(\,f(x)\,\)を求める。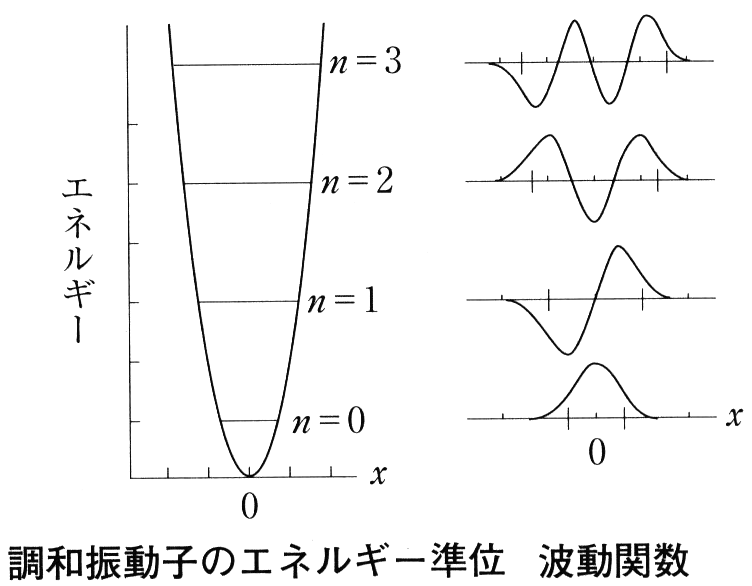 (1.7) 式で与えられる波動関数は図の中央に示したように、エネルギー準位を区別する量子数\(\,n\,\)が増えるにつれ上下の振動が激しくなる。波動関数の値が\(\,0\,\)になる位置を節(ふし)という。
(1.7) 式で与えられる波動関数は図の中央に示したように、エネルギー準位を区別する量子数\(\,n\,\)が増えるにつれ上下の振動が激しくなる。波動関数の値が\(\,0\,\)になる位置を節(ふし)という。 波動方程式の簡単な例として、左図のようなバネ(バネ定数を\(\,k\,\))につるされた質量\(\,m\,\)の錘(おもり)の振動を考える。位置エネルギーは、\(\,U(x)=\frac{1}{2}kx^2\,\) であり、釣り合った位置から\(\,x\,\)だけ錘がずれると、図の右に示した放物線に沿って上がって行き、常に中心に引き戻される力が働いて振動する。このような振動を調和振動子という。
波動方程式の簡単な例として、左図のようなバネ(バネ定数を\(\,k\,\))につるされた質量\(\,m\,\)の錘(おもり)の振動を考える。位置エネルギーは、\(\,U(x)=\frac{1}{2}kx^2\,\) であり、釣り合った位置から\(\,x\,\)だけ錘がずれると、図の右に示した放物線に沿って上がって行き、常に中心に引き戻される力が働いて振動する。このような振動を調和振動子という。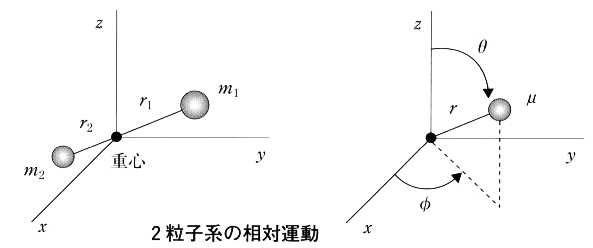 2個の粒子を含む場合すなわち2粒子系の波動方程式は、以下のように取り扱うと1個の粒子の問題になり簡単になる。図の左に示したように、質量\(\,m_1\,\)と\(\,m_2\,\)の2個の球が距離$r$で結ばれているとして、その運動を考える。
2個の粒子を含む場合すなわち2粒子系の波動方程式は、以下のように取り扱うと1個の粒子の問題になり簡単になる。図の左に示したように、質量\(\,m_1\,\)と\(\,m_2\,\)の2個の球が距離$r$で結ばれているとして、その運動を考える。 直線運動を行う物体で運動の持続性(慣性)に影響する量である質量に対応するのが、回転運動における\(\,I\,\)であり、慣性モーメントと呼ばれる。慣性モーメントは
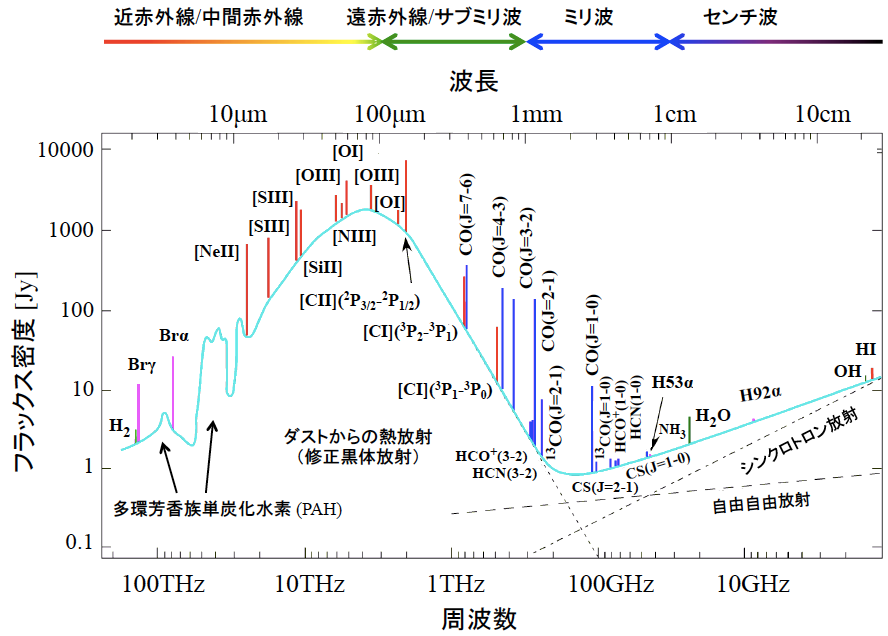
直線運動を行う物体で運動の持続性(慣性)に影響する量である質量に対応するのが、回転運動における\(\,I\,\)であり、慣性モーメントと呼ばれる。慣性モーメントは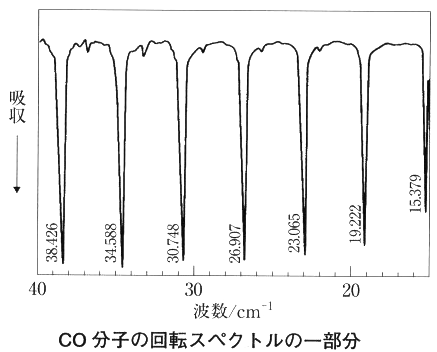 回転運動だけに起因するスペクトルはマイクロ波領域から遠赤外線領域に現れる。図は期待状態のCO分子の吸収スペクトルである。規則的な間隔の吸収線からなる。式(2.8)より2原子分子の場合の回転エネルギー準位は下図のようになることが理論的に予測できる。
回転運動だけに起因するスペクトルはマイクロ波領域から遠赤外線領域に現れる。図は期待状態のCO分子の吸収スペクトルである。規則的な間隔の吸収線からなる。式(2.8)より2原子分子の場合の回転エネルギー準位は下図のようになることが理論的に予測できる。 このようにして、光子を1つ吸収することによる(2原子分子の)回転遷移は、\(\,J\,\)の値が1つだけ変化する状態の間に起こることがわかる。吸収はエネルギーが増える方向への遷移であるが、エネルギーが減る方向の瀬には発光スペクトルとして観測され、実際同様なスペクトルを示すことがわかっている。すなわち回転遷移の選択則は\(\,\Delta J=\pm 1\,\)である。ここでは、この選択則を実測との対応から導いたが、理論的にも同じ結果が導かれる。
このようにして、光子を1つ吸収することによる(2原子分子の)回転遷移は、\(\,J\,\)の値が1つだけ変化する状態の間に起こることがわかる。吸収はエネルギーが増える方向への遷移であるが、エネルギーが減る方向の瀬には発光スペクトルとして観測され、実際同様なスペクトルを示すことがわかっている。すなわち回転遷移の選択則は\(\,\Delta J=\pm 1\,\)である。ここでは、この選択則を実測との対応から導いたが、理論的にも同じ結果が導かれる。