\(\def\bm{\boldsymbol}\)\(\def\di{\displaystyle}\)\(\def\ve{\varepsilon_0}\)\(\def\dd#1#2{\dfrac{\partial #1}{\partial #2}}\)\(\def\dda#1#2{\dfrac{\partial^2 #1}{\partial #2}}\)
1. 流体粒子と流体運動の扱い
流体を考える際、2つの捉え方がある。
[1] ラグランジュの方法( Lagrange )
物体(固体)の運動と同様、各流体粒子に着目して、各流体粒子が時間の経過とともに、どのように動くかを追跡していく方法である。
この方法は、一つの流体粒子の経路や加速度を知る上では便利ではあるが、流れ場が全体的にどのようになっているかを知るには適さない。
[2] オイラーの方法( Euler )
この方法は、特定の流体粒子を追跡するのではなく、流れ場全体の様子をそれぞれの時刻に一度に調べる方法である。すなわち、流速や圧力を、座標\(\,\,x\,,\,y\,,\,z\,,\,\)および時間\(\,t\,\)の関数として表す。この方法は、流体の運動を調べる流体力学において、一般に用いられる方法である。
2. テーラー展開
まずは、数学の準備をします。
[1] 1 変数でのテーラー展開
\(\quad\)関数\(\,f(x)\,\)において、点\(\,a\,\)の周りでテーラー展開すると
\begin{equation}f(x)=f(a)+f^{\prime}(a)(x-a)+\dots+\dfrac{f^{(n)}(a)}{n!}(x-a)^n+\cdots
\end{equation}\(\quad\)ここで、\(\,x\,\to\,x+\Delta x\,\quad a\,\to\,x\,\) と置き換えると
\begin{equation}
f(x+\Delta x)=f(x)+(\Delta x)\,f^{\prime}(x)+\dfrac{(\Delta x)^2}{2!}f^{\prime\prime}(x)+\cdots+\dfrac{(\Delta x)^n}{n!}f^{(n)}(x)+\cdots
\end{equation}[2] 多変数のテーラー展開\begin{align}f(x+\Delta x,& y+\Delta y,z+\Delta z)=f(x,y,z)+\left(\Delta x \dd{}{x}+\Delta y\dd{}{y}+\Delta z\dd{}{z}\right)f(x,y,z)\\ &+\dfrac{1}{2!}\left(\Delta x \dd{}{x}+\Delta y\dd{}{y}+\Delta z\dd{}{z}\right)^2f(x,y,z)+\cdots \end{align}\(\quad\)ここで、\(\bm{x}=^t(\,x,\,y,\,z)\,\,\,\,\bm{h}=^t(\Delta x,\Delta y,\Delta z)\,\)とおくと、\begin{equation} f(\bm{x}+\bm{h})=f(\bm{x})+\sum_{n=0}^{\infty}\dfrac{1}{n!}(\nabla\cdot\bm{h})^nf(\bm{x})\qquad\text{と表すことができる}\end{equation}
3. ラグランジュ微分
ラグランジュ微分とは、オイラーの方法とラグランジュの方法の両方の流儀を混ぜ合わせたような概念である。時々刻々と移動していく流体の「ある一部分」を追いかけながら、その「一部分」が持つ物理量\(\,A\,\)の時間的な変化を考える。
時刻\(\,t\,\)に、位置\(\,\bm{x}=(x,y,z)\,\)にある速度\(\,\bm{u}=(u_x,u_y,u_z)\,\)の流体の持つ物理量を\(\,A(x,y,z,t)\,\)と表す。\(\,\Delta t\,\)秒後にはこの流体はおよそ\(\,(\,x+u_x\Delta t,\,y+u_y\Delta t,\,z+u_z\Delta t\,)\,\)付近に移動していることであろう。つまり、\(\,\Delta t\,\)秒後がの移動後の地点での物理量は\(\,A(x+u_x\Delta t,y+u_y\Delta t,z+u_z\Delta t,t+\Delta t)\,\)となる。
これをテーラー展開の一次で近似すると\begin{align}A(x+u_x\Delta t,& y+u_y\Delta t,z+u_z\Delta t,t+\Delta t)\\&\doteq A(x,y,z,t)+\dd{A}{x}u_x\Delta t+\dd{A}{y}u_y\Delta t+\dd{A}{z}\Delta t+\dd{A}{t}\Delta t\end{align}変化分を計算すると\begin{align}\Delta A&\doteq A(x+u_x\Delta t,y+u_y\Delta t,z+u_z\Delta t,t+\Delta t)-A(x,y,z,t)\\&\doteq\dd{A}{x}u_x\Delta t+\dd{A}{y}u_y\Delta t+\dd{A}{z}u_z\Delta t+\dd{A}{t}\Delta t\\&=\left(\dd{A}{x}u_x+\dd{A}{y}u_y+\dd{A}{z}u_z+\dd{A}{t}\right)\Delta t\qquad\cdots\quad\text{(1)}\end{align}これを時間経過による変化割合で表すと\begin{equation}\dfrac{\Delta A}{\Delta t}\doteq\dd{A}{x}u_x+\dd{A}{y}u_y+\dd{A}{z}u_z+\dd{A}{t}\qquad\cdots\quad\text{(2)}\end{equation}(1)式の近似には\(\,\Delta t\,\)の2乗以上に比例する程度の誤差があり、それを\(\,\Delta t\,\)で割った(2)式には\(\,\Delta t\,\)あるいは\(\,\Delta t\,\)の2乗以上に比例するような誤差が含まれているが、ここで\(\,\Delta t\,\to\,0\,\)の極限を考えれば無視できるようになるので、それを等式を使って次のように表す。\begin{equation}\dfrac{DA}{Dt}=\dd{A}{x}u_x+\dd{A}{y}u_y+\dd{A}{z}u_z+\dd{A}{t}\qquad\cdots\quad\text{(3)}\end{equation}これが、「ラグランジュ微分」「物質微分」などと呼ばれているものである。これは、流体と一緒に流れている人から見た、その地点での物理量\(\,A\,\)の時間的な変化率である。
物理量\(\,A\,\)を省いて、順序を変えると以下のようになる。
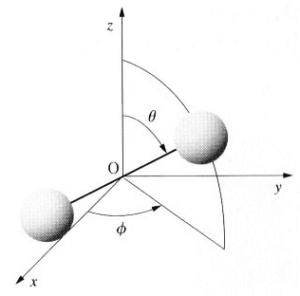
\begin{equation}\dfrac{D}{Dt}\equiv u_x\dd{}{x}+u_y\dd{}{y}+u_z\dd{}{z}+\dd{}{t}=\bm{u}\cdot\nabla+\dd{}{t}\quad\cdots\quad\text{(4)}\end{equation}流体の加速度をその点での微分とラグランジュ微分で比べたのが、下の図である。

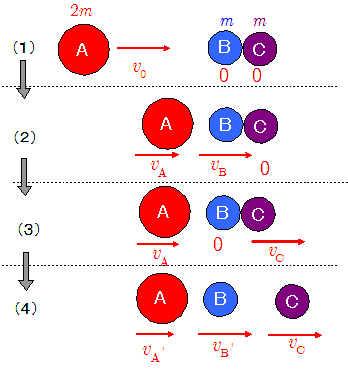
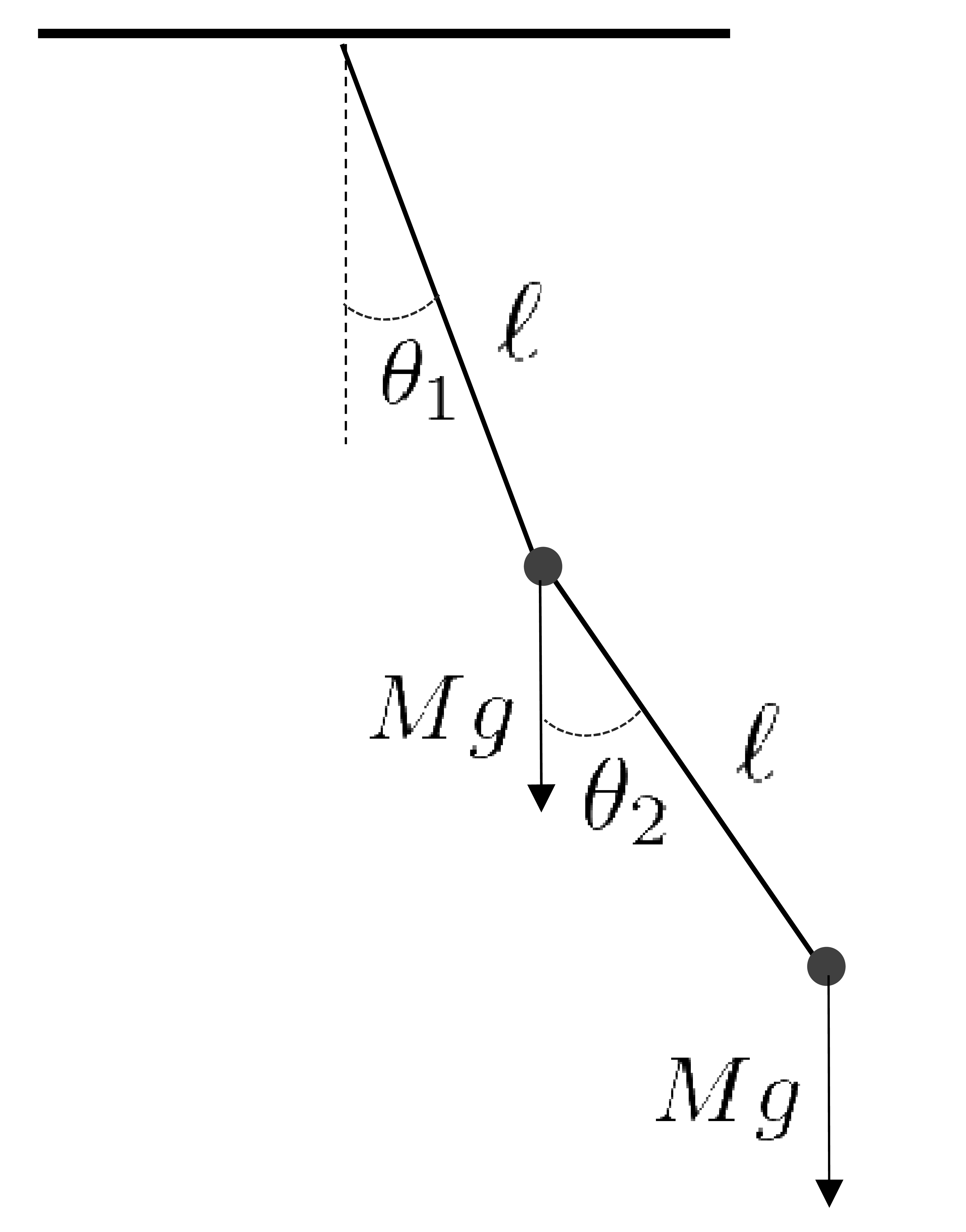 最初のオモリの座標を \((x_1,y_1)\,\) , そこから垂れ下がったオモリの座標を \((x_2,y_2)\,\) とする。
最初のオモリの座標を \((x_1,y_1)\,\) , そこから垂れ下がったオモリの座標を \((x_2,y_2)\,\) とする。
 (「ふりこのはたらき」 \(730\)円)
(「ふりこのはたらき」 \(730\)円)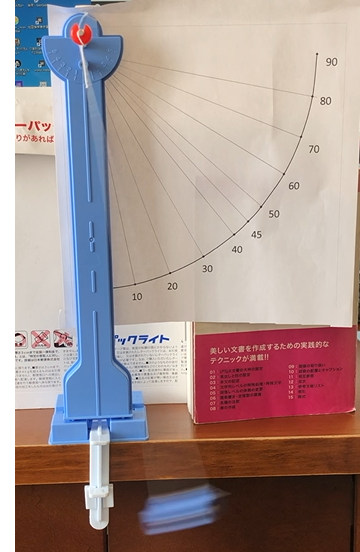 ひもの長さは\(30\)cmとして、振れ角測定用に角度を書いた紙を付けました。大きく振った位置から重りを降ろした。
ひもの長さは\(30\)cmとして、振れ角測定用に角度を書いた紙を付けました。大きく振った位置から重りを降ろした。
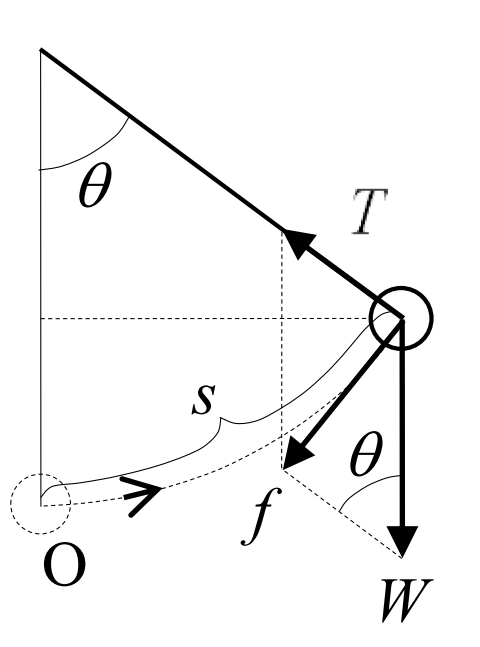 糸の張力\(\,T\,\)、重力\(\,W\,\)の合力\(\,f^{\prime\prime}\)が重りに掛かる。
糸の張力\(\,T\,\)、重力\(\,W\,\)の合力\(\,f^{\prime\prime}\)が重りに掛かる。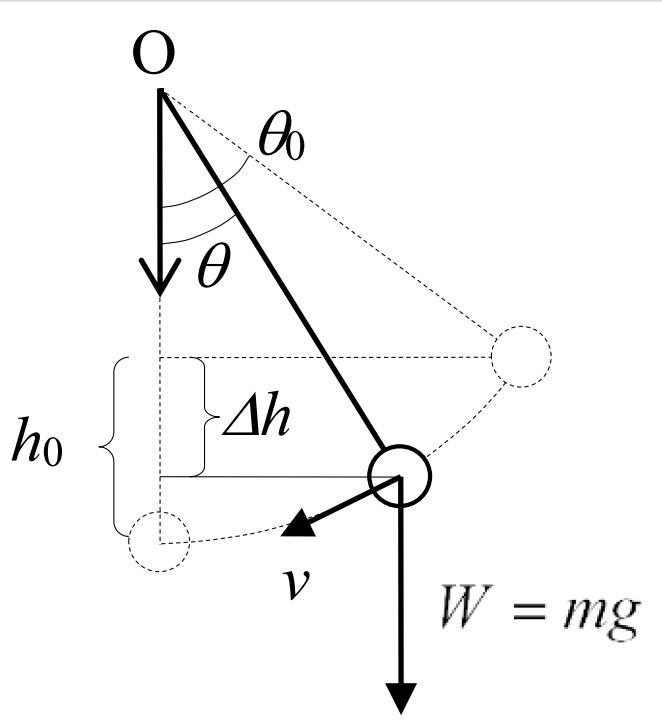 エネルギー保存則を用いて、振幅の大きい振り子の運動を計算する。振り子の最下点を原点とし、振りだし高さを\(\,h_0\,\)、\(\Delta h\,\)だけ降りた点の円周方向の速度を\(\,v\,\)とすると
エネルギー保存則を用いて、振幅の大きい振り子の運動を計算する。振り子の最下点を原点とし、振りだし高さを\(\,h_0\,\)、\(\Delta h\,\)だけ降りた点の円周方向の速度を\(\,v\,\)とすると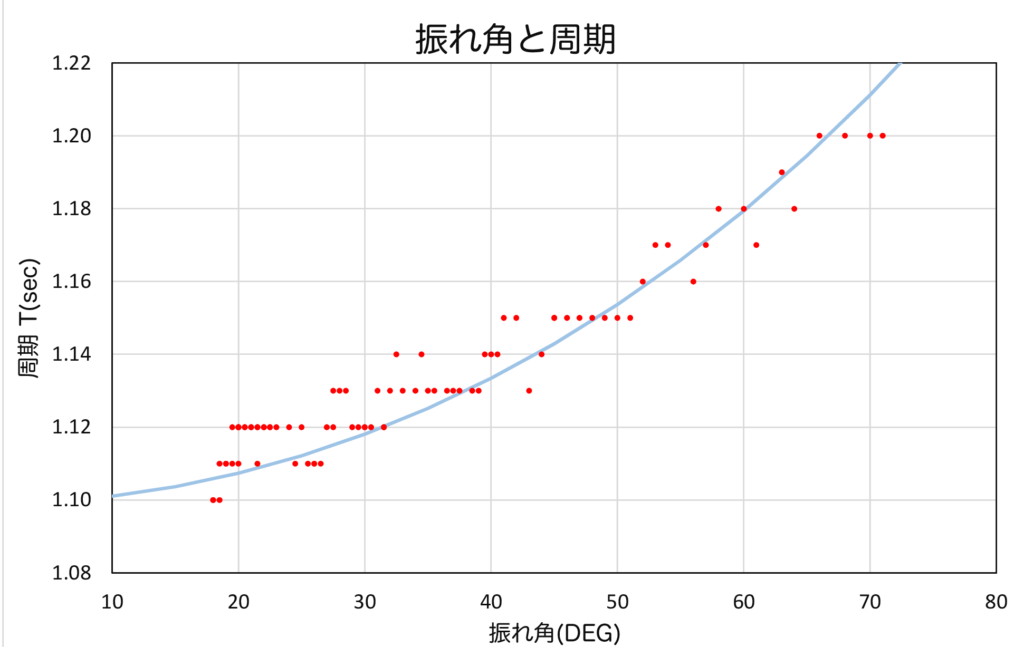
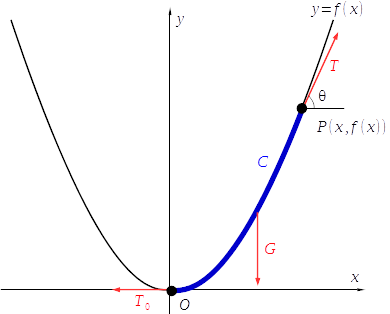 ひもの底を原点\(O\,\)とし、水平方向に\(x\,\)軸、鉛直方向に\(y\,\)軸をとる。ひもの曲線を\(\,y=f(x)\,\)とおいて関数\(\,f(x)\,\)を求める。
ひもの底を原点\(O\,\)とし、水平方向に\(x\,\)軸、鉛直方向に\(y\,\)軸をとる。ひもの曲線を\(\,y=f(x)\,\)とおいて関数\(\,f(x)\,\)を求める。
 単原子分子では並進運動の自由度が3なので、\(\,C_V=\frac{3}{2}\mathrm{R}\)。
単原子分子では並進運動の自由度が3なので、\(\,C_V=\frac{3}{2}\mathrm{R}\)。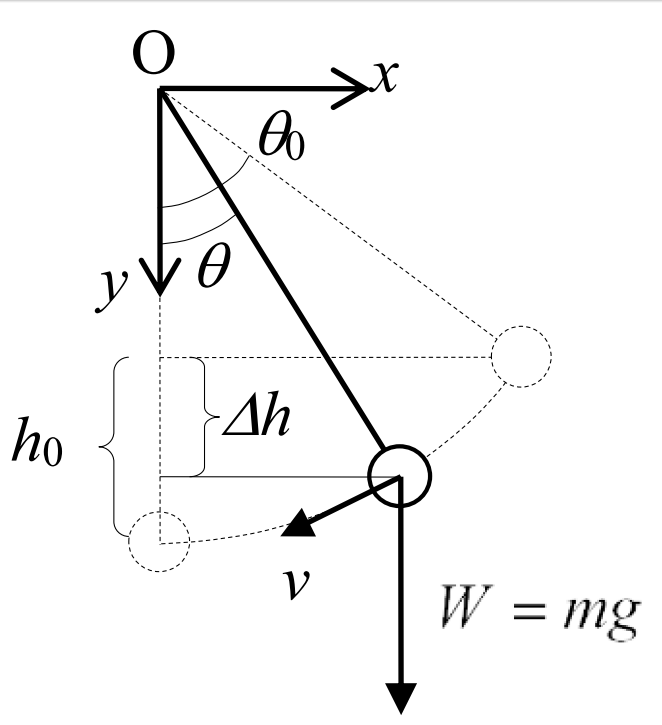 振り子の支点より水平方向に \(\ x\ \)軸をとり、鉛直方向に \(\ y\ \)軸をとると、エネルギー保存則から、次式が成立する
振り子の支点より水平方向に \(\ x\ \)軸をとり、鉛直方向に \(\ y\ \)軸をとると、エネルギー保存則から、次式が成立する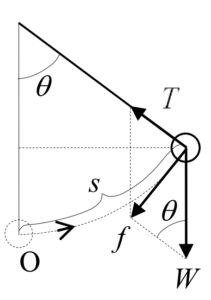
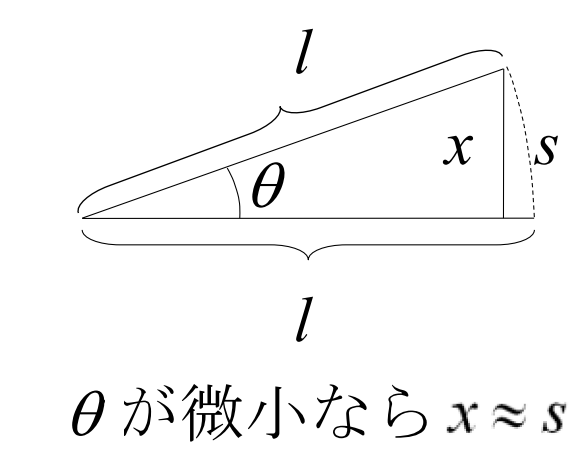 (5)式の運動方程式は、三角関数を含んでいるため、このままでは階を求めることが難しい。但し、円弧の角度\(\ \theta\ \)が微少の場合、三角形の高さ\(\ x=\sin\theta\ \)は円弧の長さ\(\ s\ \)にほぼ等しくなり
(5)式の運動方程式は、三角関数を含んでいるため、このままでは階を求めることが難しい。但し、円弧の角度\(\ \theta\ \)が微少の場合、三角形の高さ\(\ x=\sin\theta\ \)は円弧の長さ\(\ s\ \)にほぼ等しくなり